GPS NEO giao tiếp Atmega là module định vị toàn cầu sử dụng hệ thống vệ tinh GPS của Mỹ. Mạch định vị GPS NEO-6M cho tốc độ xác định vị trí nhanh và chính xác, có nhiều mức năng lượng hoạt động, phù hợp với các ứng dụng chạy pin. Module định vị GPS sử dụng board điều khiển kết nối của hãng U-BLOX đến từ Thụy Sĩ có rất nhiều năm kinh nghiệm trong lĩnh vực sản xuất module định vị toàn cầu. Module GPS NEO-6M v2 có thể được cấp nguồn từ 3.3V – 5V nhưng chỉ giao tiếp ở mức 3.3V. Trên module có sẵn port serial để bạn kết nối.
Table of Contents
1. Linh kiện cần thiết làm mạch Định vị GPS NEO giao tiếp Atmega
1.1 Vi điều khiển AVR trong mạch Định vị GPS NEO giao tiếp Atmega
a. Giới thiệu
Atmega16 là một chíp vi điều khiển được sản xuất bời hãng Atmel thuộc họ MegaAVR. Atmega16 là một bộ vi điều khiển 8 bit dựa trên kiến trúc RISC bộ nhớ chương trình 16KB ISP flash có thể ghi xóa hàng nghìn lần, 512B EEPROM, một bộ nhớ RAM vô cùng lớn trong thế giới vi xử lý 8 bit (1KB SRAM) Với 32 chân có thể sử dụng cho các kết nối vào hoặc ra i/O, 32 thanh ghi, 3 bộ timer/counter có thể lập trình, có các gắt nội và ngoại (2 lệnh trên một vector ngắt), giao thức truyền thông nối tiếp USART, SPI, I2C. Ngoài ra có thể sử dụng bộ biến đổi số tương tự 10 bít (ADC/DAC) mở rộng tới 8 kênh, khả năng lập trình được watchdog timer, hoạt động với 5 chế độ nguồn, có thể sử dụng tới 6 kênh điều chế độ rộng xung (PWM), hỗ trợ bootloader. 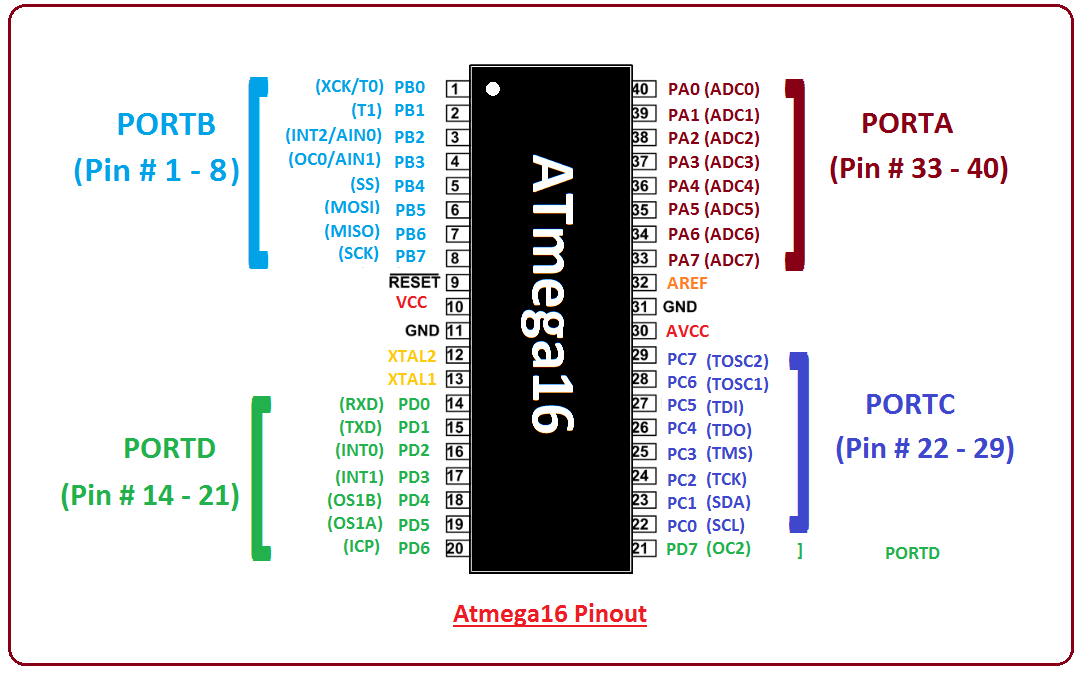

b. Chức năng của Atmega:
- PORTA: Các chân từ 33 đến 40 thuộc PORTA. Nó hoạt động giống như đầu vào analog cho bộ chuyển đổi A / D. Tuy nhiên, trong trường hợp không có bộ chuyển đổi A / D, PORTA được sử dụng làm cổng I / O hai chiều 8 bit. Nó đi kèm với điện trở kéo bên trong.
- PORTB: Các chân từ 1 đến 8 thuộc về PORTB. Đây là các chân hai chiều I / O. Cổng này cũng bao gồm các điện trở kéo lên bên trong.
- PORTC: PORTC là cổng I / O hai chiều bao gồm 8 chân. Chân từ 22 đến 29 thuộc về cổng này, tương tự như các cổng khác, nó đi kèm với điện trở kéo bên trong.
- PORTD: Chân từ 14 đến 21 thuộc về cổng này. Đây là cổng hai chiều trong đó mỗi chân có thể được sử dụng làm chân đầu vào hoặc đầu ra. Tuy nhiên, có các tính năng bổ sung liên quan đến cổng này như ngắt, giao tiếp nối tiếp, bộ hẹn giờ và PWM.
Các chức năng khác
- Reset: Chân 9 là chân reset mức thấp đang hoạt động. Xung mức thấp dài hơn độ dài xung tối thiểu sẽ tạo ra reset. Các xung ngắn không có khả năng tạo ra reset.
- VCC: Chân 10 là chân cấp nguồn cho bộ điều khiển này. Nguồn điện của cần phải có 5 V để đặt bộ điều khiển này trong điều kiện đang chạy.
- GND: Chân 11 là chân nối đất.
- AREF: Chân 32 là chân tham chiếu tương tự chủ yếu được sử dụng cho bộ chuyển đổi A / D .
- AVCC: Chân 30 là AVCC là chân điện áp cung cấp cho PORTA và ADC. Nó được kết nối với VCC thông qua bộ lọc thông thấp khi có ADC. Tuy nhiên, trong trường hợp không có ADC, AVCC được kết nối bên ngoài với VCC.
- Chân 12 & 13: Một bộ dao động tinh thể được kết nối với các chân này. Atmega16 hoạt động ở tần số bên trong 1MHZ; bộ dao động được thêm vào để tạo ra xung clock và tần số cao.
c.Thông số kỹ thuật Atmega (Dip)
| Datasheets | Atmega16 |
| Standard Package | 27 |
| Category | Integrated Circuits (ICs) |
| Family | Embedded – Atmel |
| Series | Atmega |
| Packaging | Tube |
| Core Processor | AVR |
| Core Size | 8-Bit |
| Speed | 16MHz |
| Connectivity | I²C, SPI, UART / USART, USB |
| Peripherals | Brown-out Detec t/ Reset, HLVD, POR, PWM, WDT |
| Number of I /O | 32 |
| Program Memory Size | 16KB |
| Program Memory Type | FLASH |
| EEPROM Size | 512B |
| RAM Size | 1K |
| Voltage – Supply (Vcc/Vdd) | 4.2 V ~ 5.5 V |
| Data Converters | A/D 8 x 10bit |
| Oscillator Type | Internal |
| Operating Temperature | -40°C ~ 85°C |
| Package / Case | 28-SOIC (0.295″, 7.50mm Width) |
| Other Names | Atmega16 |
d. Power
- 5V: Điện áp ra 5V (dòng điện trên mỗi chân này tối đa là 500mA).
- GND: Là chân mang điện cực âm trên board.
- IOREF: Điệp áp hoạt động của vi điều khiển trên AVR và có thể đọc điện áp trên chân IOREF. Chân IOREF không dùng để làm chân cấp nguồn.
e.Bộ nhớ
Vi điều khiển ATmega:- 16 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB.
- 2 KB cho SRAM: (Static Random Access Menory): giá trị các biến khai báo sẽ được lưu ở đây. Khai báo càng nhiều biến thì càng tốn nhiều bộ nhớ RAM. Khi mất nguồn dữ liệu trên SRAM sẽ bị mất.
- 512B cho EEPROM: (Electrically Eraseble Programmable Read Only Memory): Là nơi có thể đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
f. Kiến trúc của Atmega16
Kiến trúc của Atmega16 dựa trên Kiến trúc Harvard và đi kèm với các bus và bộ nhớ riêng biệt. Các lệnh được lưu trữ trong bộ nhớ chương trình.- CPU
- ROM
- RAM
EEPROM
- Ngắt
- Module I / O analog và kỹ thuật số
Bộ định thời / Bộ đếm
- Watchdog timer
- Giao tiếp nối tiếp
1.2 Định vị GPS NEO giao tiếp Atmega
a. Giới thiệu
- Module định vị GPS sử dụng board điều khiển kết nối của hãng U-BLOX đến từ Thụy Sĩ có rất nhiều năm kinh nghiệm trong lĩnh vực sản xuất module định vị toàn cầu.
- Module GPS NEO-6M v2 có thể được cấp nguồn từ 3.3V – 5V nhưng chỉ giao tiếp ở mức 3.3V. Trên module có sẵn port serial để bạn kết nối.
- Việc cấu hình thông số kết nối GPS, thời gian nhấp nháy LED, mức năng lượng hoạt động… được thiết lập thông qua phần mềm u-Center.
- Mức năng lượng kết nối: Max performance (0), với mức này bạn có tọa độ chính xác nhất nhưng đòi hỏi module phải để ngoài trời, nếu hoạt động trong nhà sẽ khó bắt sóng. Bạn có thể cấu hình cho module hoạt động ở mức Eco power (4) để tiết kiệm năng lượng, ở chế độ (4) module chỉ cần 3-4 vệ tinh là có thể bắt sóng được.
- LED nhấp nháy khi chưa kết nối theo tần số 1Hz, duty cycle: 50%. Sau khi module fix được tín hiệu GPS, LED nhấp nháy nhanh hơn theo tần số 5Hz, duty cycle 20%.
- Để cấu hình module GPS NEO-6M bạn cần 1 cổng Serial giao tiếp ở mức 3.3V. Chúng tôi hiện có 2 loại USB to TTL Serial có thể đáp ứng tốt: PL2303HX và CP2102. Bạn tham khảo link sau để biết cách cấu hình: github . Chúng tôi sẵn lòng trợ giúp việc cấu hình cho module nếu bạn có thắc mắc nào.
- Bạn có thể gắn antena bên ngoài hoặc hàn trực tiếp vào module. Khi cho module hoạt động, hướng antena lên trên để module bắt sóng tốt.

b. Thông số kỹ thuật
- Mạch định vị GPS GY-NEO 6M, nguồn cung cấp 3V-5V
- Mẫu: GY-GPS6MV2
- Mô-đun với ăng-ten bằng sứ, tín hiệu mạnh
- EEPROM power-down lưu dữ liệu tham số cấu hình
- Với pin dự phòng dữ liệu
- Chỉ báo tín hiệu LED
- Kích thước ăng ten 12*12mm
- Kích thước module 23mm*30mm
- Lắp đặt khẩu độ 3mm
- Tốc độ baud mặc định: 9600
- Tương thích với nhiều module điều khiển chuyến bay, cung cấp kiểm tra máy tính GPS
- Dòng hoạt động bình thường: 50 mA
- Dòng hoạt động ở trạng thái tiết kiệm: 30 mA
- Giao tiếp UART/TTL (Để sử dụng giao tiếp UART bạn có thể sử dụng module UART TTL CP2102)
- Baud rate: Gồm nhiều mức khác nhau 1200, 2400, 4800, 19200, 38400, 9600 (mặc định), 57600, 115200,…
c. Các chân tín hiệu
- VCC – 3.3 – 5V
- GND – GND
- TX : chân truyền dữ liệu
- RX : chân truyền dữ liệu
d. Ứng dụng GPS Neo
- Cảnh báo chồng trộm xe máy
- Hệ thống máy nhịp tim, Oxy SPO2, và định vị cho người già.
- Hệ thống định vị trên điện thoại.
- Hệ thống dò đường Google Map.
- Xe tự hành với mô hình lớn.
1.3 LCD1602 cho mạch Định vị GPS NEO giao tiếp Atmega
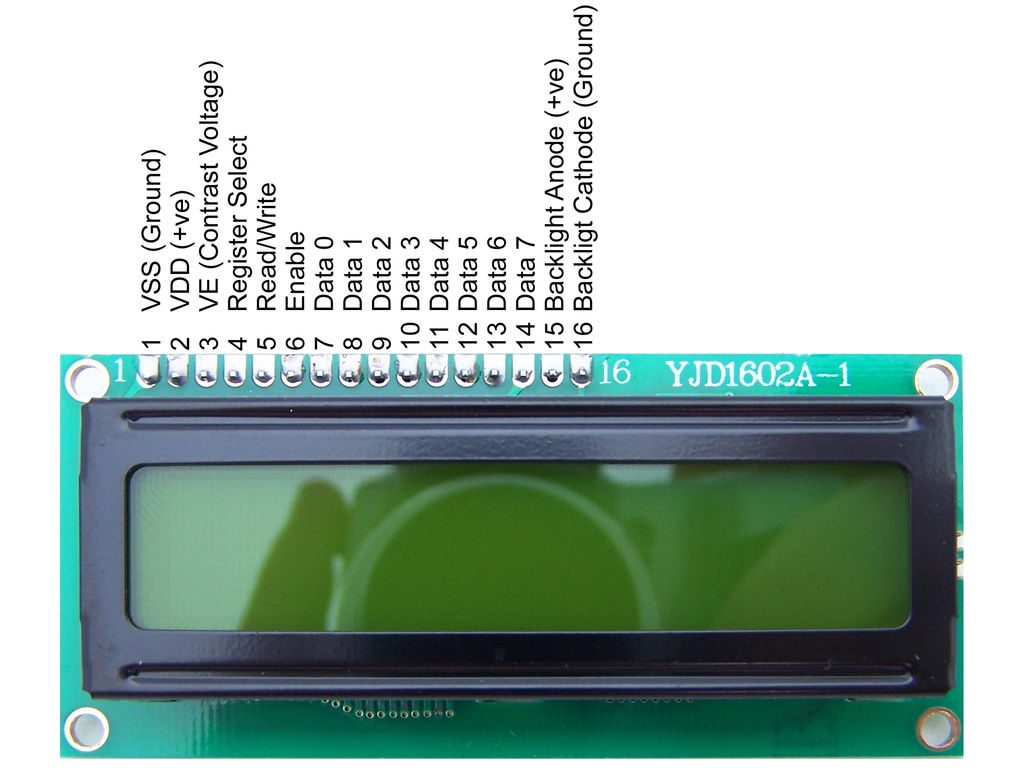
a. Giới thiệu LCD1602
b. Thông số kỹ thuật LCD1602
- Điện áp hoạt động là 5 V.
- Kích thước: 80 x 36 x 12.5 mm
- Chữ đen, nền xanh lá
- Khoảng cách giữa hai chân kết nối là 0.1 inch tiện dụng khi kết nối với Breadboard.
- Tên các chân được ghi ở mặt sau của màn hình LCD hổ trợ việc kết nối, đi dây điện.
- Có đèn led nền, có thể dùng biến trở hoặc PWM điều chình độ sáng để sử dụng ít điện năng hơn.
- Có thể được điều khiển với 6 dây tín hiệu
- Có bộ ký tự được xây dựng hổ trợ tiếng Anh và tiếng Nhật, xem thêm HD44780 datasheet để biết thêm chi tiết.
c. Sơ đồ chân LCD 16×2 LCD1602
| Số chân | Ký hiệu chân | Mô tả chân |
| 1 | Vss | Cấp điện 0v |
| 2 | Vcc | Cấp điện 5v |
| 3 | V0 | Chỉnh độ tương phản |
| 4 | RS | Lựa chọn thanh ghi địa chỉ hay dữ liệu |
| 5 | RW | Lựa chọn thanh ghi Đọc hay Viết |
| 6 | EN | Cho phép xuất dữ liệu |
| 7 | D0 | Đường truyền dữ liệu 0 |
| 8 | D1 | Đường truyền dữ liệu 1 |
| 9 | D2 | Đường truyền dữ liệu 2 |
| 10 | D3 | Đường truyền dữ liệu 3 |
| 11 | D4 | Đường truyền dữ liệu 4 |
| 12 | D5 | Đường truyền dữ liệu 5 |
| 13 | D6 | Đường truyền dữ liệu 6 |
| 14 | D7 | Đường truyền dữ liệu 7 |
| 15 | A | Chân dương đèn màn hình |
| 16 | K | Chân âm đèn màn hình |
Trong 16 chân của LCD được chia ra làm 3 dạng tín hiệu như sau:
- Các chân cấp nguồn: Chân số 1 là chân nối mass (0V), chân thứ 2 là Vdd nối với nguồn+5V. Chân thứ 3 dùng để chỉnh contrast thường nối với biến trở.
- Các chân điều khiển: Chân số 4 là chân RS dùng để điều khiển lựa chọn thanh ghi. ChânR/W dùng để điều khiển quá trình đọc và ghi. Chân E là chân cho phép dạng xung chốt.
- Các chân dữ liệu D7÷D0: Chân số 7 đến chân số 14 là 8 chân dùng để trao đổi dữ liệu giữa thiết bị điều khiển và LCD.
d. Địa chỉ ba vùng nhớ LCD1602
- Bộ điều khiển LCD có ba vùng nhớ nội, mỗi vùng có chức năng riêng. Bộ điều khiển phải khởi động trước khi truy cập bất kỳ vùng nhớ nào. a. Bộ nhớ DDRAM
- Bộ nhớ chứa dữ liệu để hiển thị (Display Data RAM: DDRAM) lưu trữ những mã ký tự để hiển thị lên màn hình. Mã ký tự lưu trữ trong vùng DDRAM sẽ tham chiếu với từng bitmap kí tự được lưu trữ trong CGROM đã được định nghĩa trước hoặc đặt trong vùng do người sử dụng định nghĩa. b. Bộ phát kí tự ROM – CGROM
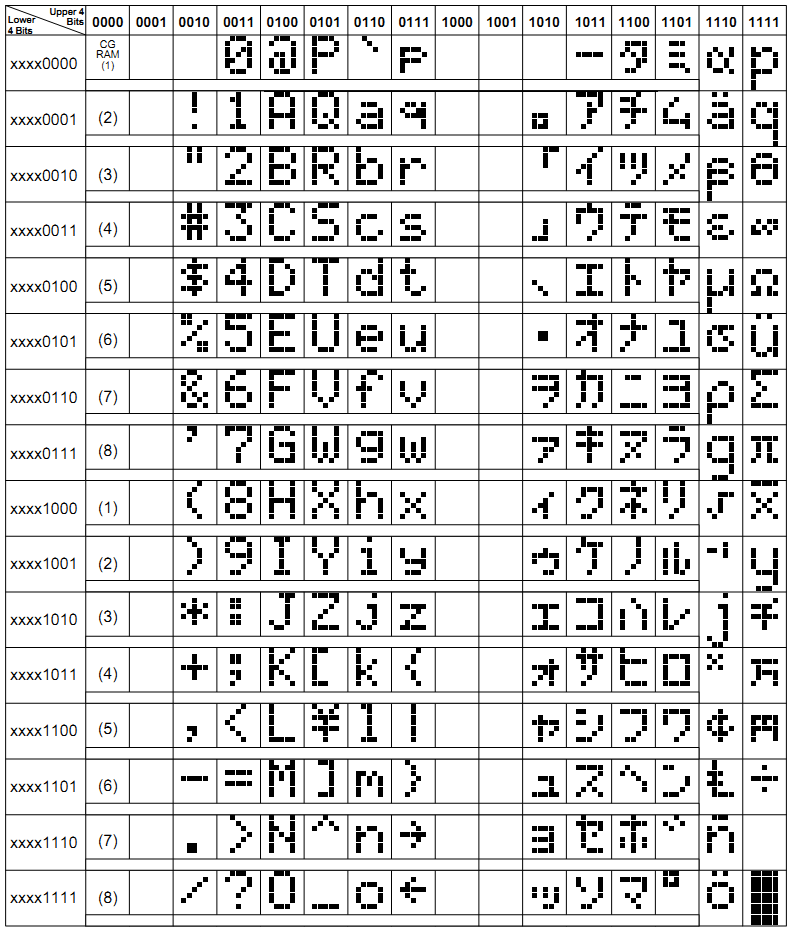
- Bộ phát kí tự ROM (Character Generator ROM: CGROM) chứa các kiểu bitmap cho mỗi kí tự được định nghĩa trước mà LCD có thể hiển thị, như được trình bày bảng mã ASCII. Mã kí tự lưu trong DDRAM cho mỗi vùng kí tự sẽ được tham chiếu đến một vị trí trong CGROM. Ví dụ: mã kí tự số hex 0x53 lưu trong DDRAM được chuyển sang dạng nhị phân 4 bit cao là DB[7:4] = “0101” và 4 bit thấp là DB[3:0] = “0011” chính là kí tự chữ ‘S’ sẽ hiển thị trên màn hình LCD. c. Bộ phát kí tự RAM – CGRAM
- Bộ phát kí tự RAM (Character Generator RAM: CG RAM) cung cấp vùng nhớ để tạo ra 8 kí tự tùy ý. Mỗi kí tự gồm 5 cột và 8 hàng.
e. Các lệnh điều khiển của LCD
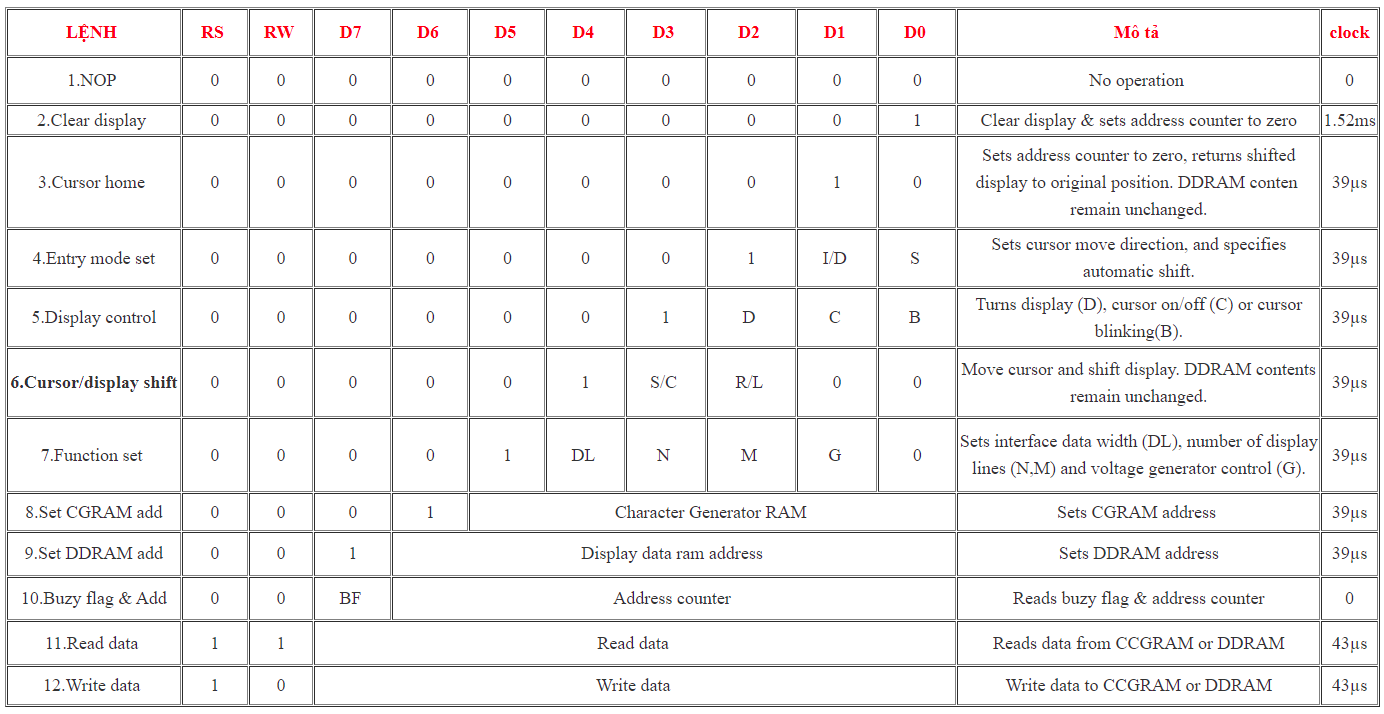
- Lệnh thiết lập chức năng giao tiếp “Function set”:
- Bit DL (data length) = 1 thì cho phép giao tiếp 8 đường data D7 ÷ D0, nếu bằng 0 thì cho phép giao tiếp 4 đường D7 ÷ D4.
- Bit N (number of line) = 1 thì cho phép hiển thị 2 hàng, nếu bằng 0 thì cho phép hiển thị 1 hàng.
- Bit F (font) = 1 thì cho phép hiển thị với ma trận 5×8, nếu bằng 0 thì cho phép hiển thị với ma trận 5×11.
- Các bit cao còn lại là hằng số không đổi.
Lệnh xoá màn hình “Clear Display”: khi thực hiện lệnh này thì LCD sẽ bị xoá và bộ đếm địa chỉ được xoá về 0.
- Lệnh di chuyển con trỏ về đầu màn hình “Cursor Home”: khi thực hiện lệnh này thì bộ đếm địa chỉ được xoá về 0, phần hiển thị trở về vị trí gốc đã bị dịch trước đó. Nội dung bộ nhớ RAM hiển thị DDRAM không bị thay đổi.
- Lệnh thiết lập lối vào “Entry mode set”: lệnh này dùng để thiết lập lối vào cho các kí tự hiển thị,
- Bit I/D = 1 thì con trỏ tự động tăng lên 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị, khi I/D = 0 thì con trỏ sẽ tự động giảm đi 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị.
- Bit S = 1 thì cho phép dịch chuyển dữ liệu mỗi khi nhận 1 byte hiển thị.
Lệnh điều khiển con trỏ hiển thị “Display Control”:
- Bit D: cho phép LCD hiển thị thì D = 1, không cho hiển thị thì bit D = 0.
- Bit C: cho phép con trỏ hiển thị thì C= 1, không cho hiển thị con trỏ thì bit C = 0.
- Bit B: cho phép con trỏ nhấp nháy thì B= 1, không cho con trỏ nhấp nháy thì bit B = 0.
- Với các bit như trên thì để hiển thị phải cho D = 1, 2 bit còn lại thì tùy chọn, trong thư viện thì cho 2 bit đều bằng 0, không cho phép mở con trỏ và nhấp nháy, nếu bạn không thích thì hiệu chỉnh lại.
- Lệnh di chuyển con trỏ “Cursor /Display Shift”: lệnh này dùng để điều khiển di chuyển con trỏ hiển thị dịch chuyển
- Bit SC: SC = 1 cho phép dịch chuyển, SC = 0 thì không cho phép.
- Bit RL xác định hướng dịch chuyển: RL = 1 thì dịch phải, RL = 0 thì dịch trái. Nội dung bộ nhớ DDRAM vẫn không đổi.
- Vậy khi cho phép dịch thì có 2 tùy chọn: dịch trái và dịch phải.
- Lệnh thiết lập địa chỉ cho bộ nhớ RAM phát kí tự “Set CGRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM phát kí tự.
- Lệnh thiết lập địa chỉ cho bộ nhớ RAM hiển thị “Set DDRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM lưu trữ các dữ liệu hiển thị.
- Hai lệnh cuối cùng là lệnh đọc và lệnh ghi dữ liệu LCD.
f. Bảng mã ASCII sử dụng cho LCD
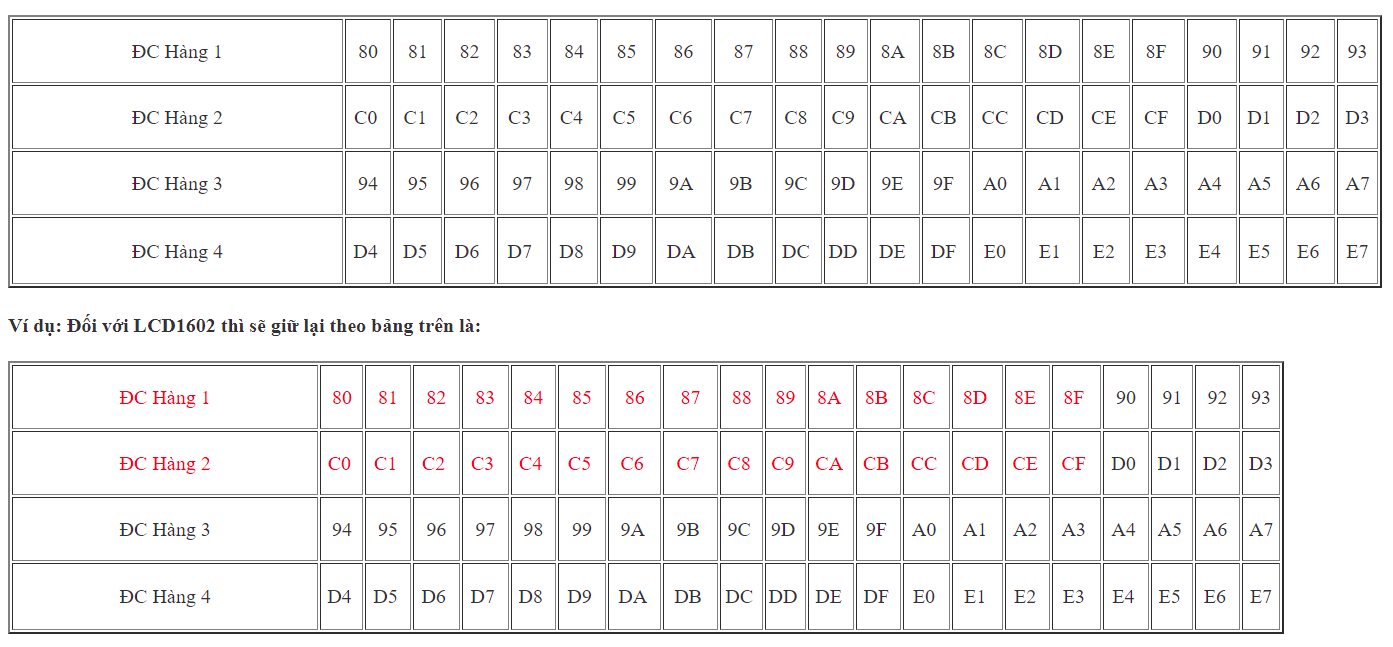
g. Bảng địa chỉ cho LCD
2. Hướng dẫn đồ án hiển thị thông tin Định vị GPS NEO giao tiếp Atmega hiển thị LCD1602
Phần này chưa được chia sẻ.
LIÊN HỆ thông tin ở TẠI ĐÂY để được hổ trợ tốt hơn.
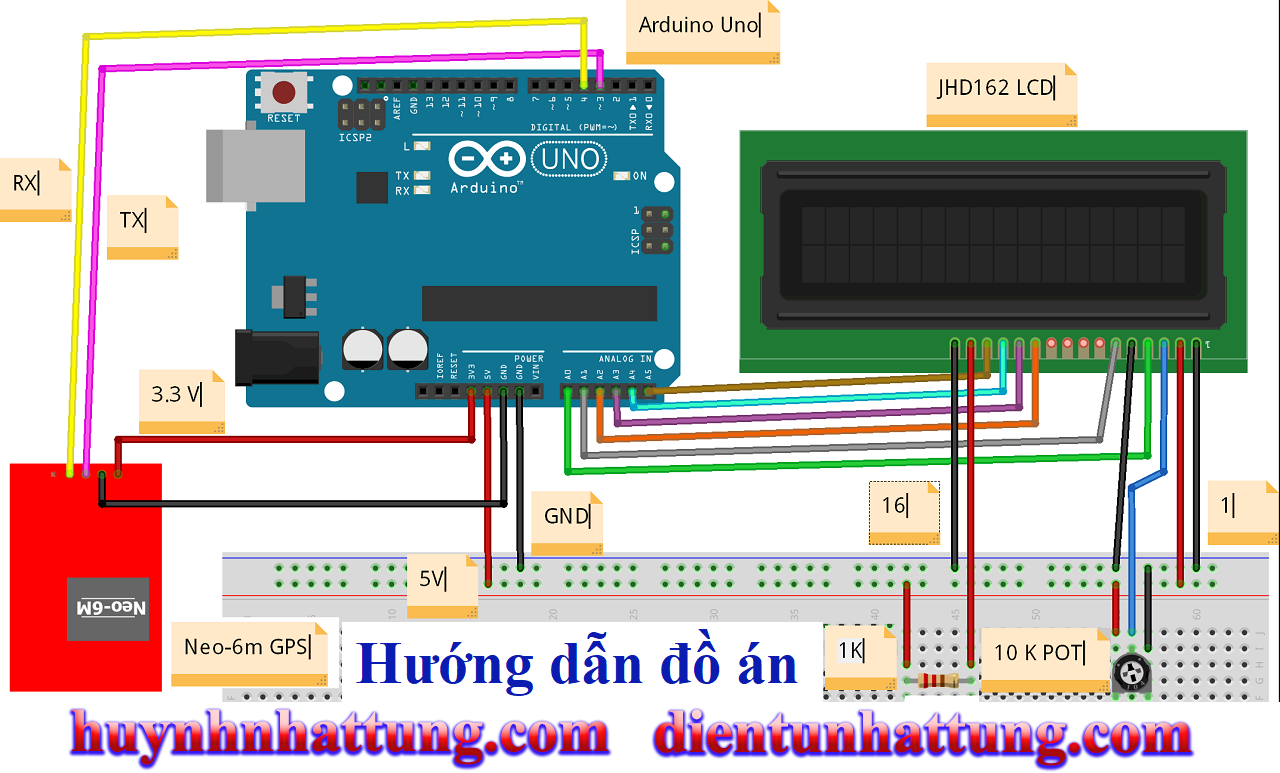
Phần cứng
Phần mềm LCD1602
- Thư viện TinyGPS.h tải : https://github.com/mikalhart/TinyGPS
- Các thư viện khác hổ trợ tải trên phần mềm Arduino IDE
#include <LiquidCrystal.h>
#include <SoftwareSerial.h>
#include <TinyGPS.h>
//long lat,lon; // create variable for latitude and longitude object
float lat = 28.5458,lon = 77.1703; // create variable for latitude and longitude object
SoftwareSerial gpsSerial(3,4);//rx,tx
LiquidCrystal lcd(A0,A1,A2,A3,A4,A5);
TinyGPS gps; // create gps object
void setup(){
Serial.begin(9600); // connect serial
//Serial.println("The GPS Received Signal:");
gpsSerial.begin(9600); // connect gps sensor
lcd.begin(16,2);
}
void loop(){
while(gpsSerial.available()){ // check for gps data
if(gps.encode(gpsSerial.read()))// encode gps data
{
gps.f_get_position(&lat,&lon); // get latitude and longitude
// display position
lcd.clear();
lcd.setCursor(1,0);
lcd.print("GPS Signal");
//Serial.print("Position: ");
//Serial.print("Latitude:");
//Serial.print(lat,6);
//Serial.print(";");
//Serial.print("Longitude:");
//Serial.println(lon,6);
lcd.setCursor(1,0);
lcd.print("LAT:");
lcd.setCursor(5,0);
lcd.print(lat);
//Serial.print(lat);
//Serial.print(" ");
lcd.setCursor(0,1);
lcd.print(",LON:");
lcd.setCursor(5,1);
lcd.print(lon);
}
}
String latitude = String(lat,6);
String longitude = String(lon,6);
Serial.println(latitude+";"+longitude);
delay(1000);
}3. Hoạt động của mạch Định vị GPS NEO giao tiếp Atmega
Khi cấp điện hệ thống hoạt động, vi điều khiển hiển thị thông tin ban đầu. Lúc này vi điều khiển chờ tín hiệu từ mạch định vị gps neo 6m trả về để đọc kinh độ, vĩ độ, thời gian thực gồm giờ phút giây, thứ ngày tháng năm và kiểm tra mức tín hiệu, Khi nhận tín hiệu vi điều khiển tính toán, xử lý dữ liệu và xuất tín hiệu giá trị thực tế ra màn hình LCD1602 hiển thị thông tin có người hoặc không có người theo yêu cầu của người lập trình.
3. Cụ thể hoạt động của mạch Định vị GPS NEO giao tiếp Atmega:
Sẽ còn các phần khác nữa nhé.
Chúc các bạn thành công…!!!




{kind=link}