DC Step giao tiếp Stm32 là dùng Step Motor là một loại động cơ chạy bằng điện có nguyên lý và ứng dụng khác biệt với đa số các động cơ điện thông thường. Chúng thực chất là một động cơ đồng bộ dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay hoặc các chuyển động của rôto có khả năng cố định roto vào các vị trí cần thiết Động cơ bước là một loại động cơ mà bạn có thể quy định được góc quay của nó. Ví dụ một động cơ bước 1,8 độ/bước quay hết 1 vòng 360 độ thì mất 200 bước (gọi là FULL STEP). Các chế độ quay nhiều xung thì động cơ quay sẽ êm hơn
- Phone : 0967.551.477
- Zalo : 0967.551.477
- FB : Huỳnh Nhật Tùng
- Email : dientunhattung@gmail.com
- Địa Chỉ: 106/14 Đường số 51, Phường 14, Gò Vấp, Tp HCM
- Chi tiết: Nhận làm mạch và đồ án Điện tử
Table of Contents
1. Linh kiện cần thiết làm mạch điều khiển động cơ bước DC Step giao tiếp Stm32
1.1 Vi điều khiển STM trong mạch điều khiển động cơ bước DC Step giao tiếp Stm32
a. Giới thiệu
STM32 là một trong những dòng chip phổ biến của ST với nhiều họ thông dụng như F0,F1,F2,F3,F4….. Stm32f103 thuộc họ F1 với lõi là ARM COTEX M3. STM32F103 là vi điều khiển 32 bit, tốc độ tối đa là 72Mhz. Giá thành cũng khá rẻ so với các loại vi điều khiển có chức năng tương tự. Mạch nạp cũng như công cụ lập trình khá đa dạng và dễ sử dụng. Một số ứng dụng chính: dùng cho driver để điều khiển ứng dụng, điều khiển ứng dụng thông thường, thiết bị cầm tay và thuốc, máy tính và thiết bị ngoại vi chơi game, GPS cơ bản, các ứng dụng trong công nghiệp, thiết bị lập trình PLC, biến tần, máy in, máy quét, hệ thống cảnh báo, thiết bị liên lạc nội bộ… Phần mềm lập trình: có khá nhiều trình biên dịch cho STM32 như IAR Embedded Workbench, Keil C… Ở đây mình sử dụng Keil C nên các bài viết sau mình chỉ đề cập đến Keil C. 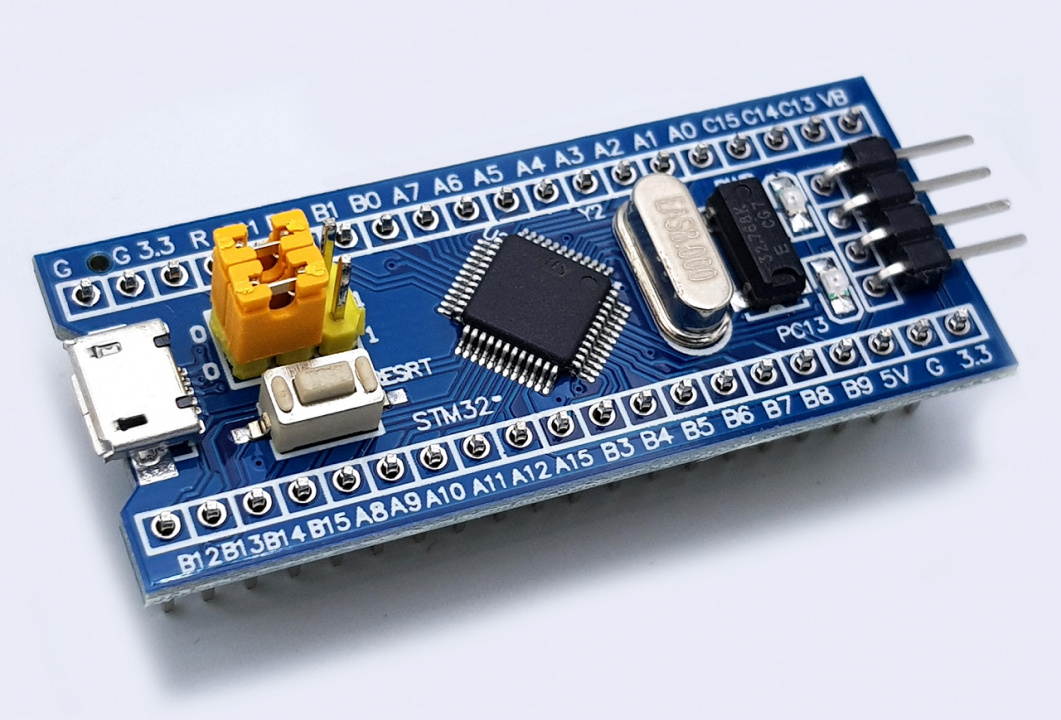
Thông tin khác
Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit. Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt. Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, … 
b. Sơ lược về STM32:
- 1 cổng Mini USB dùng để cấp nguồn, nạp cũng như debug.
- 2 MCU bao gồm 1 MCU nạp và 1 MCU dùng để lập trình.
- Có chân Output riêng cho các chân mạch nạp trên MCU1.
- Có chân Output đầy đủ cho các chân MCU2.
- Chân cấp nguồn ngoài riêng cho MCU2 nếu không sử dụng nguồn từ USB.
- Thạch anh 32,768khz dùng cho RTC và Backup.
- Chân nạp dùng cho chế độ nạp boot loader.
- Nút Reset ngoài và 1 led hiển thị trên chân PB9, 1 led báo nguồn cho MCU2.
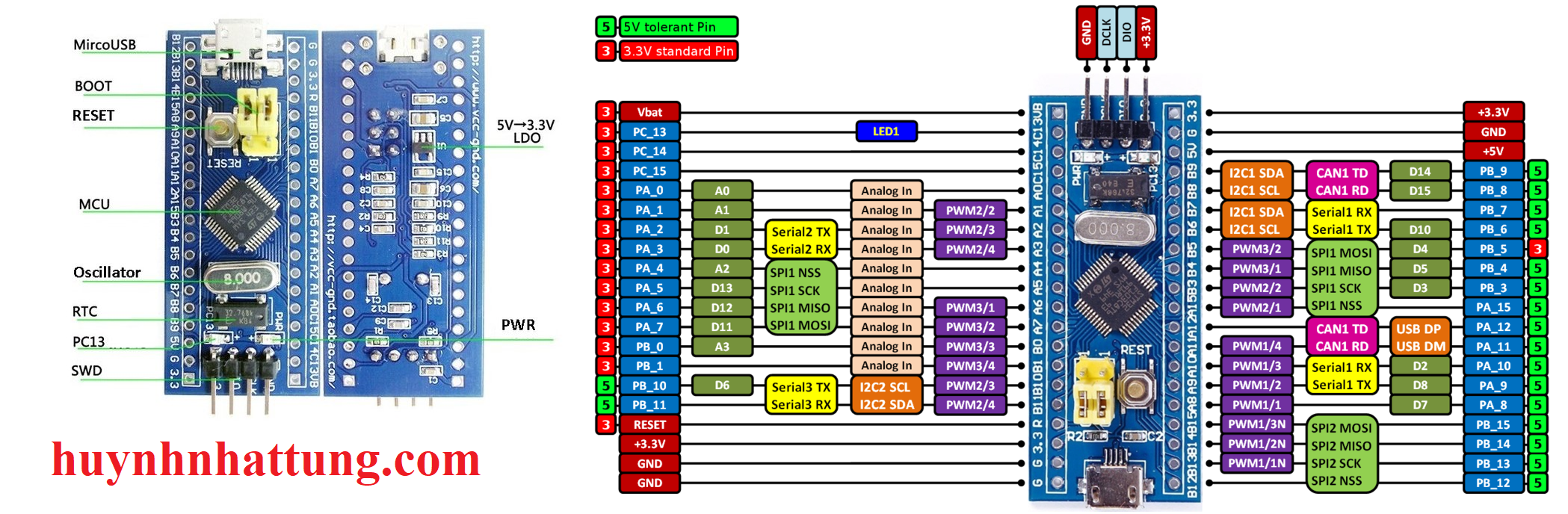
c.Thông số kỹ thuật STM32
- Vi điều khiển: STM32F103C8T6.
- Điện áp cấp 5VDC qua cổng Micro USB sẽ được chuyển đổi thành 3.3VDC qua IC nguồn và cấp cho Vi điều khiển chính.
- Tích hợp sẵn thạch anh 8Mhz.
- Tích hợp sẵn thạnh anh 32Khz cho các ứng dụng RTC.
- Ra chân đầy đủ tất cả các GPIO và giao tiếp: CAN, I2C, SPI, UART, USB,…
- Tích hợp Led trạng thái nguồn, Led PC13, Nút Reset.
- Kích thước: 53.34 x 15.24mm
- Sử dụng với các mạch nạp:
- ST-Link Mini
- J-link
- USB TO COM
- Kết nối chân khi nạp bằng ST-Link Mini
- Nạp theo chuẩn SWD
- TCK — SWCLK
- TMS — SWDIO
- GND — GND
- 3.3V — 3.3V
d. Cấu hình
- ARM 32-bit Cortex M3 với clock max là 72Mhz.
- Bộ nhớ:
- 64 kbytes bộ nhớ Flash(bộ nhớ lập trình).
- 20kbytes SRAM.
- Clock, reset và quản lý nguồn.
- Điện áp hoạt động 2.0V -> 3.6V.
- Power on reset(POR), Power down reset(PDR) và programmable voltage detector (PVD).
- Sử dụng thạch anh ngoài từ 4Mhz -> 20Mhz.
- Thạch anh nội dùng dao động RC ở mode 8Mhz hoặc 40khz.
- Sử dụng thạch anh ngoài 32.768khz được sử dụng cho RTC.
- Trong trường hợp điện áp thấp:
- Có các mode :ngủ, ngừng hoạt động hoặc hoạt động ở chế độ chờ.
- Cấp nguồn ở chân Vbat bằng pin để hoạt động bộ RTC và sử dụng lưu trữ data khi mất nguồn cấp chính.
- 2 bộ ADC 12 bit với 9 kênh cho mỗi bộ.
- Khoảng giá trị chuyển đổi từ 0 – 3.6V.
- Lấy mẫu nhiều kênh hoặc 1 kênh.
- Có cảm biến nhiệt độ nội.
- DMA: bộ chuyển đổi này giúp tăng tốc độ xử lý do không có sự can thiệp quá sâu của CPU.
- 7 kênh DMA.
- Hỗ trợ DMA cho ADC, I2C, SPI, UART.
- 7 timer.
- 3 timer 16 bit hỗ trợ các mode IC/OC/PWM.
- 1 timer 16 bit hỗ trợ để điều khiển động cơ với các mode bảo vệ như ngắt input, dead-time..
- 2 watdog timer dùng để bảo vệ và kiểm tra lỗi.
- 1 sysTick timer 24 bit đếm xuống dùng cho các ứng dụng như hàm Delay….
- Hỗ trợ 9 kênh giao tiếp bao gồm:
- 2 bộ I2C(SMBus/PMBus).
- 3 bộ USART(ISO 7816 interface, LIN, IrDA capability, modem control).
- 2 SPIs (18 Mbit/s).
- 1 bộ CAN interface (2.0B Active)
- USB 2.0 full-speed interface
- Kiểm tra lỗi CRC và 96-bit ID.
e.Bộ nhớ
Vi điều khiển ATmega328:- 64 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB.
- 20 KB cho SRAM: (Static Random Access Menory): giá trị các biến khai báo sẽ được lưu ở đây. Khai báo càng nhiều biến thì càng tốn nhiều bộ nhớ RAM. Khi mất nguồn dữ liệu trên SRAM sẽ bị mất.
- 1 KB cho EEPROM: (Electrically Eraseble Programmable Read Only Memory): Là nơi có thể đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
1.2 Động cơ bước DC Step giao tiếp Stm32
a. Giới thiệu
- Động cơ bước hay còn gọi là Step Motor là một loại động cơ chạy bằng điện có nguyên lý và ứng dụng khác biệt với đa số các động cơ điện thông thường. Chúng thực chất là một động cơ đồng bộ dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay hoặc các chuyển động của rôto có khả năng cố định roto vào các vị trí cần thiết
- Động cơ bước là một loại động cơ mà bạn có thể quy định được góc quay của nó. Ví dụ một động cơ bước 1,8 độ/bước quay hết 1 vòng 360 độ thì mất 200 bước (gọi là FULL STEP). Các chế độ quay nhiều xung thì động cơ quay sẽ êm hơn

b. Thông số kỹ thuật
- Kích thước bao: 42mm x 42mm
- Kích thước trục: 5mm
- Lưu ý sản phẩm có chân nguồn trực tiếp mà sẽ lấy nguồn từ driver động cơ bước để chạy
- Đầu cốt 5mm khuyết 1 bên để dễ dàn bắt puly chống xoay (tuột bước,mất bước)
- Bước 1.8 độ – 1.2A
c. Những loại động cơ bước – Step Motor
Việc phân loại động cơ Step cũng có thể chia thành nhiều cách. Cách 1: Phân loại động cơ Step theo số pha động cơ.
- Động cơ Step 2 pha tương ứng với góc bước 1.8 độ.
- Động cơ Step 3 pha tương ứng với góc bước là 1.2 độ.
- Và cuối cùng là động cơ Step 5 pha với góc bước là 0.72 độ.
Cách 2: Phân loại động cơ bước theo rotor.
- Động cơ có rotor được tác dụng bằng dây quấn hoặc nam châm vĩnh cữu.
- Động cơ thay đổi từ trở. Đây là loại động cơ có rotor không được tác động nhưng có phần tử cảm ứng.
Cách 3: Phân loại theo cực của động cơ.
- Động cơ đơn cực.
- Động cơ lưỡng cực.
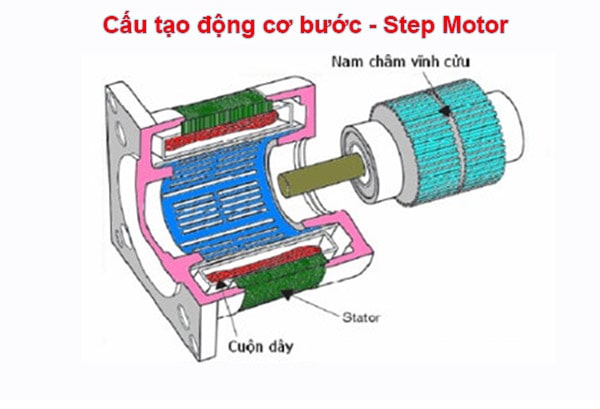
d. Cấu tạo của một động cơ bước DC Step giao tiếp Stm32 Step Motor có cấu tạo như sau: – 1 Rotor là một dãy các lá nam châm vĩnh cữu được xếp chồng lên nhau một cách cẩn thận. Trên các lá nam châm này lại chia thành các cặp cực xếp đối xứng nhau. – Stato được tạo bằng sắt từ được chia thành các rãnh để đặt cuộn dây.
Cách hoạt động.
Động cơ bước không quay theo cơ chế thông thường, Step motor quay theo từng bước một nên nó có độ chính xác cao về mặt điều khiển học. Chúng làm việc nhờ các bộ chuyển mạch điện tử. Các mạch điện tử sẽ đưa các tín hiệu của lệnh điều khiển vào stato theo thứ tự và một tần số nhất định. Tổng số góc quay của rotor tương ứng với số lần chuyển mạch, cũng như chiều quay và tốc độ quay của rotor phụ thuộc vào thứ tự chuyển đổi và tần số chuyển đổi.
e. Ưu điểm, nhược điểm của động cơ bước – Step Motor.
- Ưu điểm.
- Step Motor có ưu điểm là khả năng cung cấp moment xoắn cực lớn ở dải vận tốc thấp và trung bình.
- Một động cơ bước trên thị trường khá bền, giá thành cũng tương đối thấp.
- Việc thay thế cũng khá dễ dàng.
- Không nên dùng Step Motor cho các thiết bị đòi hỏi tốc độ cao.
- Nhược điểm.
- Step Motor hay xảy ra có hiện tượng bị trượt bước. Lí do bởi vì lực từ yếu hay nguồn điện cấp vào không đủ.
- Khi hoạt động thì Step Motor thường gây ra tiếng ồn và có hiện tượng nóng dần. Với những Step Motor thế hệ mới thì việc độ ồn và nóng của động cơ giảm đáng kể.
1.3 Module Driver A4988 điều khiển động cơ bước DC Step giao tiếp Stm32
a. Giới thiệu


b. Thông số kỹ thuật DC Step giao tiếp Stm32
- Điện áp cấp tối thiểu: 8 V
- Điện áp cấp cực đại: 35 V
- Dòng cấp liên tục cho mỗi pha: 1 A (không cần tản nhiệt, làm mát)
- Dòng cấp liên tục cho mỗi pha: 2 A (khi có làm mát, tản nhiệt)
- Điện áp logic 1 tối thiểu: 3 V
- Điện áp logic 1 tối đa: 5.5 V
- Độ phân giải: full, 1/2, 1/4, 1/8, và 1/16
c. Cách sử dụng module Driver A4988
- Lựa chọn chế độ full hay 1/2 hay 1/4.. sẽ được thông qua 3 pin MS1 MS2 MS3. Mình thường nối thẳng 3 pin này với công tắc bit 3p để dễ thiết lập từ trên phần cứng. Lưu ý là nếu thả nổi 3 pin này tức là mode full step.
- Bật tắt động cơ thì thông qua pin ENABLE, mức LOW là bật module, mức HIGH là tắt module
- Điều khiển chiều quay của động cơ thông qua pin DIR
- Điều khiển bước của động cơ thông qua pin STEP, mỗi xung là tương ứng với 1 bước ( hoặc vi bước)
- Hai chân Sleep với Reset luôn nối với nhau

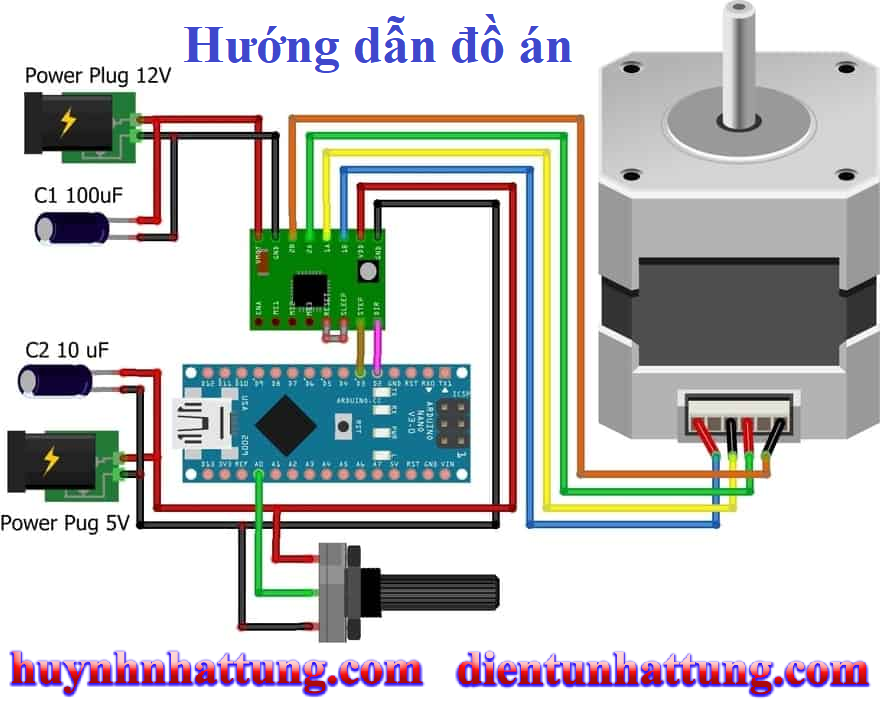
2. Hướng dẫn điều khiển động cơ bước DC Step giao tiếp Stm32 bằng biến trở
Phần cứng
Phần mềm
const int stepPin = 3; const int dirPin = 4; int customDelay,customDelayMapped; // Defines variables void setup() { // Sets the two pins as Outputs pinMode(stepPin,OUTPUT); pinMode(dirPin,OUTPUT); digitalWrite(dirPin,HIGH); //Enables the motor to move in a particular direction } void loop() { customDelayMapped = speedUp(); // Gets custom delay values from the custom speedUp function // Makes pules with custom delay, depending on the Potentiometer, from which the speed of the motor depends digitalWrite(stepPin, HIGH); delayMicroseconds(customDelayMapped); digitalWrite(stepPin, LOW); delayMicroseconds(customDelayMapped); } // Function for reading the Potentiometer int speedUp() { int customDelay = analogRead(A0); // Reads the potentiometer int newCustom = map(customDelay, 0, 1023, 300,4000); // Convrests the read values of the potentiometer from 0 to 1023 into desireded delay values (300 to 4000) return newCustom; }
3. Hoạt động của mạch điều khiển động cơ bước DC Step
Khi cấp điện hệ thống hoạt động, vi điều khiển hiển thị thông tin ban đầu. Lúc này vi điều khiển chờ tín hiệu từ nút nhấn hoặc biến trở đưa vào. Khi nhận tín hiệu vi điều khiển tính toán, xử lý dữ liệu sau đó điều khiển động cơ chạy dừng, quay thuận hoặc quay nghịch bằng nút nhấn, ngoài ra điều khiển tốc độ quay của động cơ bằng biến trở.
4. Cụ thể hoạt động của mạch điều khiển động cơ bước DC Step giao tiếp Stm32
Chúc các bạn thành công…!!!