
Table of Contents
1. Linh kiện cần thiết làm mạch cảm biến góc nghiêng SW520 giao tiếp Atmega
1.1 Vi điều khiển AVR cảm biến góc nghiêng SW520 giao tiếp Atmega
a. Giới thiệu
Atmega16 là một chíp vi điều khiển được sản xuất bời hãng Atmel thuộc họ MegaAVR. Atmega16 là một bộ vi điều khiển 8 bit dựa trên kiến trúc RISC bộ nhớ chương trình 16KB ISP flash có thể ghi xóa hàng nghìn lần, 512B EEPROM, một bộ nhớ RAM vô cùng lớn trong thế giới vi xử lý 8 bit (1KB SRAM) Với 32 chân có thể sử dụng cho các kết nối vào hoặc ra i/O, 32 thanh ghi, 3 bộ timer/counter có thể lập trình, có các gắt nội và ngoại (2 lệnh trên một vector ngắt), giao thức truyền thông nối tiếp USART, SPI, I2C. Ngoài ra có thể sử dụng bộ biến đổi số tương tự 10 bít (ADC/DAC) mở rộng tới 8 kênh, khả năng lập trình được watchdog timer, hoạt động với 5 chế độ nguồn, có thể sử dụng tới 6 kênh điều chế độ rộng xung (PWM), hỗ trợ bootloader.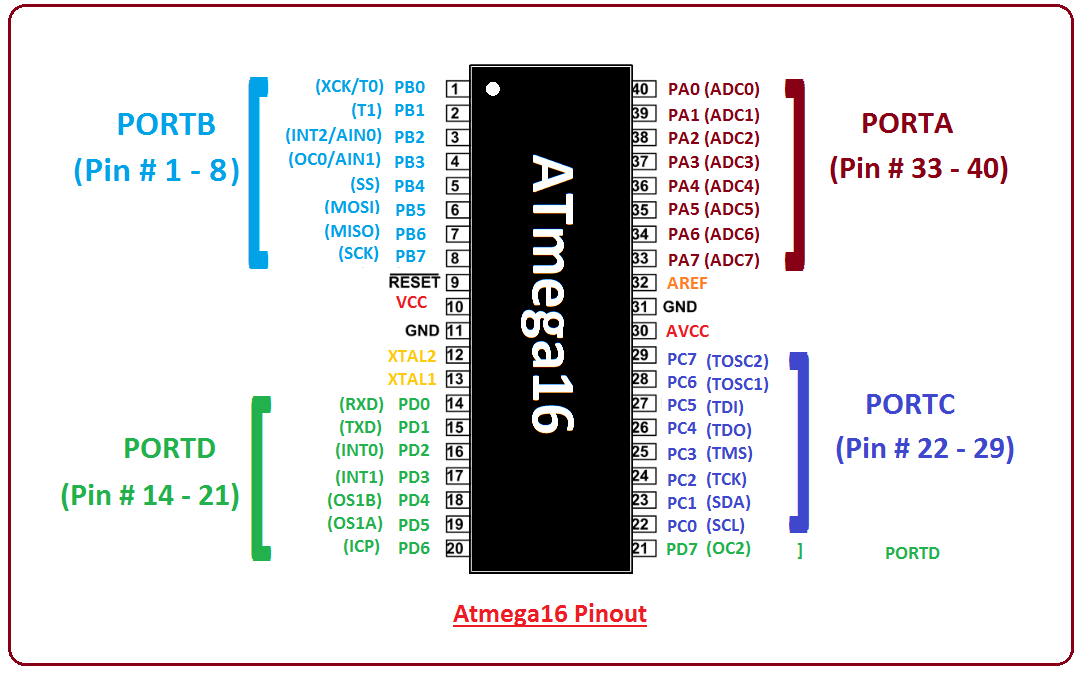 Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …
Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, … 
b. Chức năng của Atmega:
- PORTA: Các chân từ 33 đến 40 thuộc PORTA. Nó hoạt động giống như đầu vào analog cho bộ chuyển đổi A / D. Tuy nhiên, trong trường hợp không có bộ chuyển đổi A / D, PORTA được sử dụng làm cổng I / O hai chiều 8 bit. Nó đi kèm với điện trở kéo bên trong.
- PORTB: Các chân từ 1 đến 8 thuộc về PORTB. Đây là các chân hai chiều I / O. Cổng này cũng bao gồm các điện trở kéo lên bên trong.
- PORTC: PORTC là cổng I / O hai chiều bao gồm 8 chân. Chân từ 22 đến 29 thuộc về cổng này, tương tự như các cổng khác, nó đi kèm với điện trở kéo bên trong.
- PORTD: Chân từ 14 đến 21 thuộc về cổng này. Đây là cổng hai chiều trong đó mỗi chân có thể được sử dụng làm chân đầu vào hoặc đầu ra. Tuy nhiên, có các tính năng bổ sung liên quan đến cổng này như ngắt, giao tiếp nối tiếp, bộ hẹn giờ và PWM.
Các chức năng khác
- Reset: Chân 9 là chân reset mức thấp đang hoạt động. Xung mức thấp dài hơn độ dài xung tối thiểu sẽ tạo ra reset. Các xung ngắn không có khả năng tạo ra reset.
- VCC: Chân 10 là chân cấp nguồn cho bộ điều khiển này. Nguồn điện của cần phải có 5 V để đặt bộ điều khiển này trong điều kiện đang chạy.
- GND: Chân 11 là chân nối đất.
- AREF: Chân 32 là chân tham chiếu tương tự chủ yếu được sử dụng cho bộ chuyển đổi A / D .
- AVCC: Chân 30 là AVCC là chân điện áp cung cấp cho PORTA và ADC. Nó được kết nối với VCC thông qua bộ lọc thông thấp khi có ADC. Tuy nhiên, trong trường hợp không có ADC, AVCC được kết nối bên ngoài với VCC.
- Chân 12 & 13: Một bộ dao động tinh thể được kết nối với các chân này. Atmega16 hoạt động ở tần số bên trong 1MHZ; bộ dao động được thêm vào để tạo ra xung clock và tần số cao.
c.Thông số kỹ thuật Atmega (Dip)
| Datasheets | Atmega16 |
| Standard Package | 27 |
| Category | Integrated Circuits (ICs) |
| Family | Embedded – Atmel |
| Series | Atmega |
| Packaging | Tube |
| Core Processor | AVR |
| Core Size | 8-Bit |
| Speed | 16MHz |
| Connectivity | I²C, SPI, UART / USART, USB |
| Peripherals | Brown-out Detec t/ Reset, HLVD, POR, PWM, WDT |
| Number of I /O | 32 |
| Program Memory Size | 16KB |
| Program Memory Type | FLASH |
| EEPROM Size | 512B |
| RAM Size | 1K |
| Voltage – Supply (Vcc/Vdd) | 4.2 V ~ 5.5 V |
| Data Converters | A/D 8 x 10bit |
| Oscillator Type | Internal |
| Operating Temperature | -40°C ~ 85°C |
| Package / Case | 28-SOIC (0.295″, 7.50mm Width) |
| Other Names | Atmega16 |
d. Power
- 5V: Điện áp ra 5V (dòng điện trên mỗi chân này tối đa là 500mA).
- GND: Là chân mang điện cực âm trên board.
- IOREF: Điệp áp hoạt động của vi điều khiển trên AVR và có thể đọc điện áp trên chân IOREF. Chân IOREF không dùng để làm chân cấp nguồn.
e.Bộ nhớ
Vi điều khiển ATmega:- 16 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB.
- 2 KB cho SRAM: (Static Random Access Menory): giá trị các biến khai báo sẽ được lưu ở đây. Khai báo càng nhiều biến thì càng tốn nhiều bộ nhớ RAM. Khi mất nguồn dữ liệu trên SRAM sẽ bị mất.
- 512B cho EEPROM: (Electrically Eraseble Programmable Read Only Memory): Là nơi có thể đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
f. Kiến trúc của Atmega16
Kiến trúc của Atmega16 dựa trên Kiến trúc Harvard và đi kèm với các bus và bộ nhớ riêng biệt. Các lệnh được lưu trữ trong bộ nhớ chương trình.- CPU
- ROM
- RAM
EEPROM
- Ngắt
- Module I / O analog và kỹ thuật số
Bộ định thời / Bộ đếm
- Watchdog timer
- Giao tiếp nối tiếp
1.2 Cảm biến góc nghiêng SW520 giao tiếp Atmega
a. Giới thiệu
Mạch cảm biến góc nghiêng SW520 được sử dụng để phát hiện góc nghiêng (tilt) hoặc rung động (vibration) của vật thể, cảm biến góc nghiêng sw520 xuất tín hiệu dạng Digital với biến trở điểu chỉnh độ nhạy cảm biến rất dễ sử dụng. Cảm biến có thể nhận được những thay đổi góc của các đối tượng (chính xác có thể đạt 15-45 độ). Điều chỉnh độ nhạy (hiển thị trong điều chỉnh chiết áp kỹ thuật số)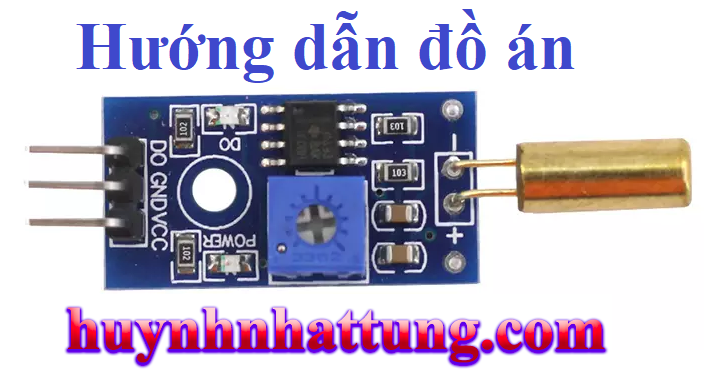
b. Thông số kỹ thuật
- Điện áp làm việc 3.3~5VDC
- Sử dụng IC so sánh LM393.
- Sử dụng cảm biến có độ nhạy cao SW-520.
- Tín hiệu so sánh đầu ra rõ, dễ dàng điều chỉnh độ nhạy qua biến trở.
- Dạng tín hiệu đầu ra: Digital TTL.
- Một lỗ bulông dễ dàng cho việc lắp đặt cố định.
- Kích thước PCB nhỏ: 3 x 1.6 cm.
c. Ứng dụng
- Hệ thống giám sát áp suất lốp (TPMS).
- Đèn xe đạp.
- Khung ảnh kỹ thuật số có thể xoay.
- Xoay màn hình.
- Máy quay video flip.
- Hệ thống chống trộm.
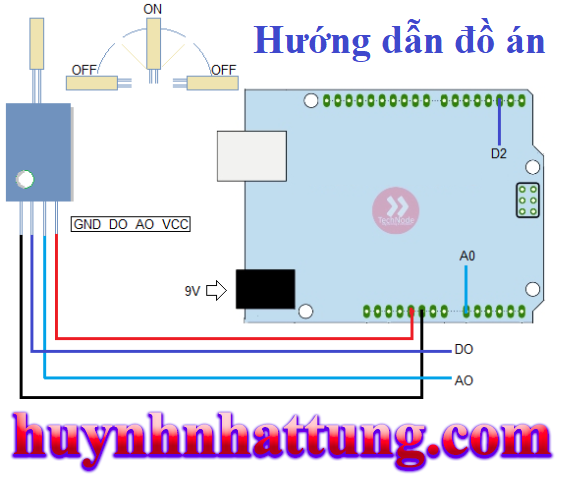
d. Sơ đồ chân của cảm biến
- VCC –> 3.3V ~ 5.3V
- AO: Tín hiệu Analog
- DO: Tín hiệu ra 0.1
- GND
1.3 Còi Buzzer 5V cảm biến góc nghiêng SW520 giao tiếp Atmega
a. Giới thiệu
Còi Buzzer 5VDC có tuổi thọ cao, hiệu suất ổn định, chất lượng tốt, được sản xuất nhỏ gọn phù hợp thiết kế với các mạch còi buzzer nhỏ gọn, mạch báo động.
b. Thông số kỹ thuật
- Nguồn : 3.5V – 5.5V
- Dòng điện tiêu thụ: <25mA
- Tần số cộng hưởng: 2300Hz ± 500Hz
- Biên độ âm thanh: >80 dB
- Nhiệt độ hoạt động:-20 °C đến +70 °C
- Kích thước : Đường kính 12mm, cao 9,7mm
2. Hướng dẫn đồ án cảm biến góc nghiêng SW520 giao tiếp Atmega điều khiển còi Buzzer
Phần này chưa được chia sẻ.
LIÊN HỆ thông tin ở TẠI ĐÂY để được hổ trợ tốt hơn.
Phần cứng
Phần mềm
Đọc tín hiệu Digital
const int statusLED = 13;
const int switchTilt = 2;
int val = 0;
void setup(){
pinMode (statusLED,OUTPUT);
pinMode (switchTilt,INPUT);
}
void loop(){
val = digitalRead(switchTilt);
if (val == HIGH){
digitalWrite(statusLED,HIGH);
}
else {
digitalWrite(statusLED,LOW);
}
}
Đọc tín hiệu Analog
int lightPin = 13;
int tiltPin = 0;
void setup() {
}
void loop() {
int analogValue = analogRead(tiltPin);
if (analogValue<512) {
analogWrite(lightPin, 0);
}
else {
analogWrite(lightPin, analogValue);
delay(1000);
}
}3. Hoạt động của mạch cảm biến góc nghiêng SW520 giao tiếp Atmega
Khi cấp điện hệ thống hoạt động, vi điều khiển hiển thị thông tin ban đầu. lúc này vi điều khiển chờ tín hiệu từ module cảm biến góc nghiêng SW520 gửi vào. Khi nhận tín hiệu từ cảm biến thì kích buzzer theo yêu cầu đã được lập trình quy định.4. Hoạt động mạch cảm biến góc nghiêng SW520 giao tiếp Atmega các bạn xem video:
Ngoài ra còn nhiều Phần và các môn khác
Đồ án điện tử, Lập trình vi điều khiển tổng hợp File đồ án – Phần 1 Mạch điện tử, Lập trình vi điều khiển tổng hợp File đồ án – Phần 2 Thiết kế mạch điện tử, Lập trình vi điều khiển tổng hợp File đồ án – Phần 3 Vi xử lý, Lập trình vi điều khiển Pic – 8051 – Avr – Phần 4 Tổng hợp File ĐỒ ÁN Điện tử cơ bản Tổng hợp File ĐỒ ÁN Viễn thông Tổng hợp File ĐỒ ÁN PLC Tổng hợp File ĐỒ ÁN Cung cấp điện
Chúc các bạn thành công…!!!