Pulse Sensor giao tiếp Atmega là dùng cảm biến nhịp tim quang dạng quang Pulse Sensor sử dụng nguyên lý đo nhịp tim bằng ánh sáng giao tiếp Analog. phù hợp cho các ứng dụng điện tử y sinh. Nhịp đập của tim là thông số rất quan trọng xây dựng 1 bài tập thể dục thật sự khoa học. Trước đây, cảm biến nhịp tim chỉ thường xuất hiện trên các thiết bị đắt tiền như : máy chạy bộ, máy đo trong bệnh viện, smartphone,..v.v.v…. Giờ đây đã xuất hiện 1 loại cảm biến đo nhịp tim mà chúng ta dễ dàng kết nối với các bo mạch điện tử như Arduino, Raspberry Pi và các MCU khác.
Liên hệ làm Đồ án và Mạch điện tửPhone : 0967.551.477Zalo : 0967.551.477FB : Huỳnh Nhật TùngEmail : dientunhattung@gmail.comĐịa Chỉ: 171/25 Lê Văn Thọ, P8, Gò Vấp, Tp HCMChi tiết: Nhận làm mạch và đồ án Điện tử
Table of Contents
1. Linh kiện cần thiết làm mạch đọc cảm biến nhịp tim quang Pulse Sensor giao tiếp Atmega
1.1 Vi điều khiển AVR trong mạch đọc cảm biến nhịp tim quang Pulse Sensor giao tiếp Atmega
a. Giới thiệu
Atmega16 là một chíp vi điều khiển được sản xuất bời hãng Atmel thuộc họ MegaAVR. Atmega16 là một bộ vi điều khiển 8 bit dựa trên kiến trúc RISC bộ nhớ chương trình 16KB ISP flash có thể ghi xóa hàng nghìn lần, 512B EEPROM, một bộ nhớ RAM vô cùng lớn trong thế giới vi xử lý 8 bit (1KB SRAM)Với 32 chân có thể sử dụng cho các kết nối vào hoặc ra i/O, 32 thanh ghi, 3 bộ timer/counter có thể lập trình, có các gắt nội và ngoại (2 lệnh trên một vector ngắt), giao thức truyền thông nối tiếp USART, SPI, I2C. Ngoài ra có thể sử dụng bộ biến đổi số tương tự 10 bít (ADC/DAC) mở rộng tới 8 kênh, khả năng lập trình được watchdog timer, hoạt động với 5 chế độ nguồn, có thể sử dụng tới 6 kênh điều chế độ rộng xung (PWM), hỗ trợ bootloader.Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …
b. Chức năng của Atmega:
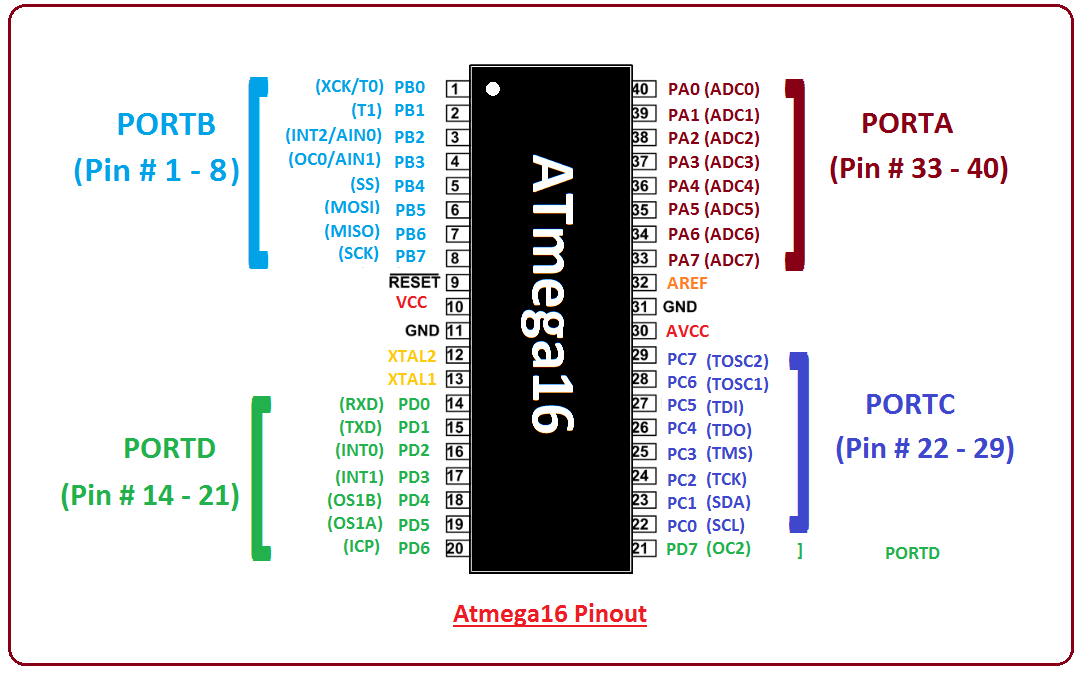
PORTA: Các chân từ 33 đến 40 thuộc PORTA. Nó hoạt động giống như đầu vào analog cho bộ chuyển đổi A / D. Tuy nhiên, trong trường hợp không có bộ chuyển đổi A / D, PORTA được sử dụng làm cổng I / O hai chiều 8 bit. Nó đi kèm với điện trở kéo bên trong.
PORTB: Các chân từ 1 đến 8 thuộc về PORTB. Đây là các chân hai chiều I / O. Cổng này cũng bao gồm các điện trở kéo lên bên trong.
PORTC: PORTC là cổng I / O hai chiều bao gồm 8 chân. Chân từ 22 đến 29 thuộc về cổng này, tương tự như các cổng khác, nó đi kèm với điện trở kéo bên trong.
PORTD: Chân từ 14 đến 21 thuộc về cổng này. Đây là cổng hai chiều trong đó mỗi chân có thể được sử dụng làm chân đầu vào hoặc đầu ra. Tuy nhiên, có các tính năng bổ sung liên quan đến cổng này như ngắt, giao tiếp nối tiếp, bộ hẹn giờ và PWM.
Các chức năng khác
Reset: Chân 9 là chân reset mức thấp đang hoạt động. Xung mức thấp dài hơn độ dài xung tối thiểu sẽ tạo ra reset. Các xung ngắn không có khả năng tạo ra reset.
VCC: Chân 10 là chân cấp nguồn cho bộ điều khiển này. Nguồn điện của cần phải có 5 V để đặt bộ điều khiển này trong điều kiện đang chạy.
GND: Chân 11 là chân nối đất.
AREF: Chân 32 là chân tham chiếu tương tự chủ yếu được sử dụng cho bộ chuyển đổi A / D .
AVCC: Chân 30 là AVCC là chân điện áp cung cấp cho PORTA và ADC. Nó được kết nối với VCC thông qua bộ lọc thông thấp khi có ADC. Tuy nhiên, trong trường hợp không có ADC, AVCC được kết nối bên ngoài với VCC.
Chân 12 & 13: Một bộ dao động tinh thể được kết nối với các chân này. Atmega16 hoạt động ở tần số bên trong 1MHZ; bộ dao động được thêm vào để tạo ra xung clock và tần số cao.
5V: Điện áp ra 5V (dòng điện trên mỗi chân này tối đa là 500mA).
GND: Là chân mang điện cực âm trên board.
IOREF: Điệp áp hoạt động của vi điều khiển trên AVR và có thể đọc điện áp trên chân IOREF. Chân IOREF không dùng để làm chân cấp nguồn.
e.Bộ nhớ
Vi điều khiển ATmega:
16 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB.
2 KB cho SRAM: (Static Random Access Menory): giá trị các biến khai báo sẽ được lưu ở đây. Khai báo càng nhiều biến thì càng tốn nhiều bộ nhớ RAM. Khi mất nguồn dữ liệu trên SRAM sẽ bị mất.
512B cho EEPROM: (Electrically Eraseble Programmable Read Only Memory): Là nơi có thể đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
f. Kiến trúc của Atmega16
Kiến trúc của Atmega16 dựa trên Kiến trúc Harvard và đi kèm với các bus và bộ nhớ riêng biệt. Các lệnh được lưu trữ trong bộ nhớ chương trình.
CPU
CPU giống như bộ não của vi điều khiển giúp thực hiện một số lệnh. Nó có thể xử lý các ngắt, thực hiện các phép tính và điều khiển các thiết bị ngoại vi với sự trợ giúp của các thanh ghi. Atmega16 đi kèm với hai bus gọi là bus hướng dẫn và bus dữ liệu. CPU đọc lệnh trong bus hướng dẫn trong khi bus dữ liệu được sử dụng để đọc hoặc ghi dữ liệu tương ứng. CPU chủ yếu bao gồm bộ đếm chương trình, các thanh ghi mục đích chung, stack pointer, thanh ghi lệnh và bộ giải mã lệnh.
ROM
Chương trình điều khiển được lưu trữ trong ROM, còn được gọi là bộ nhớ flash lập trình không bay hơi. Bộ nhớ flash có độ phân giải ít nhất 10.000 chu kỳ ghi / xóa. Bộ nhớ flash chủ yếu được chia thành hai phần được gọi là phần flash ứng dụng và phần flash booth. Chương trình của bộ điều khiển được lưu trữ trong phần flash ứng dụng. Trong khi phần flash booth được tối ưu hóa để hoạt động trực tiếp khi bộ điều khiển được bật nguồn.
RAM
SRAM (bộ nhớ truy cập ngẫu nhiên tĩnh) được sử dụng để lưu trữ thông tin tạm thời và đi kèm với các thanh ghi 8-bit, giống như một RAM máy tính thông thường được sử dụng để cung cấp dữ liệu thông qua thời gian chạy.
EEPROM
EEPROM (Bộ nhớ chỉ đọc có thể xóa bằng điện tử) là bộ nhớ không thay đổi được sử dụng như một bộ lưu trữ thời gian dài. Nó không liên quan đến việc thực thi chương trình chính. Nó được sử dụng để lưu trữ cấu hình của hệ thống và các thông số thiết bị tiếp tục hoạt động trong thiết lập lại bộ xử lý ứng dụng. EEPROM đi kèm với chu kỳ ghi giới hạn lên đến 100.000 trong khi chu kỳ đọc là không giới hạn. Trong khi sử dụng EEPROM, hãy viết các lệnh tối thiểu theo yêu cầu, để bạn có thể nhận được lợi ích từ bộ nhớ này trong thời gian dài hơn.
Ngắt
Ngắt được sử dụng cho trường hợp khẩn cấp đặt chức năng chính ở trạng thái chờ và thực hiện các lệnh cần thiết tại thời điểm đó. Khi ngắt được gọi và thực thi, mã sẽ chuyển trở lại chương trình chính.
Module I / O analog và kỹ thuật số
Module I / O kỹ thuật số được sử dụng để thiết lập giao tiếp kỹ thuật số giữa bộ điều khiển và các thiết bị bên ngoài. Trong khi module I / O analog được sử dụng để truyền thông tin analog. Bộ so sánh analog và ADC thuộc loại module I / O analog.
Bộ định thời / Bộ đếm
Bộ định thời được sử dụng để tính toán tín hiệu bên trong bộ điều khiển. Atmega16 đi kèm với hai bộ định thời 8 bit và một bộ định thời 16 bit. Tất cả bộ định thời này hoạt động như một bộ đếm khi chúng được tối ưu hóa cho các tín hiệu bên ngoài.
Watchdog timer
Watchdog timer là một bổ sung đáng chú ý trong bộ điều khiển này được sử dụng để tạo ngắt và đặt lại bộ định thời. Nó đi kèm với nguồn CLK riêng biệt 128kHz.
Giao tiếp nối tiếp
Atmega16 đi kèm với các đơn vị USART và SPI được sử dụng để phát triển giao tiếp nối tiếp với các thiết bị bên ngoài.
1.2 Cảm biến nhịp tim quang Pulse Sensor giao tiếp Atmega
a. Giới thiệu
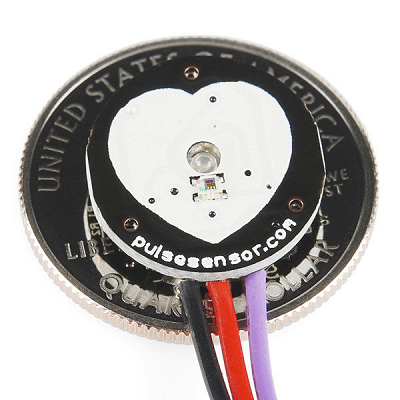
Cảm biến nhịp tim dạng quang Pulse Sensor sử dụng nguyên lý đo nhịp tim bằng ánh sáng với kích thước nhỏ gọn và giao tiếp Analog rất dễ sử dụng, phù hợp cho các ứng dụng điện tử y sinh.
Nhịp đập của tim là thông số rất quan trọng xây dựng 1 bài tập thể dục thật sự khoa học. Trước đây, cảm biến nhịp tim chỉ thường xuất hiện trên các thiết bị đắt tiền như : máy chạy bộ, máy đo trong bệnh viện, smartphone,..v.v.v….
Giờ đây đã xuất hiện 1 loại cảm biến đo nhịp tim mà chúng ta dễ dàng kết nối với các bo mạch điện tử như Arduino, Raspberry Pi và các MCU khác.
b. Thông số kỹ thuật
Nguồn : 3 – 5V
Dòng tiêu thụ : < 4mA
Ngõ ra : Analog.
Độ dài dây : 61cm ( 24 inch).
Đường kính cảm biến : 1.6 cm ( 0.625 inch).
c. Nguyên lý hoạt động
Khi áp chặt mặt cảm biến vào da, nơi có mạch máu chảy( thường là áp vào tai, đầu ngón tay,… để dễ kẹp) đầu phát sẽ phát ra ánh sáng đi vào trong da. Dòng ánh sáng đó sẽ bị khuếch tán ra xung quanh, và một phần đi tới quang trở đặt gần đầu phát. Do bị ép vào nên lượng máu ở phần cảm biến sẽ thay đổi, cụ thể khi không có áp lực do tim đập, máu sẽ dồn ra xung quanh, lượng ánh sáng từ đầu phát sẽ về đầu thu nhiều hơn so với khi tim đập, máu chảy qua nơi có cảm biến áp vào.Sự thay đổi là rất nhỏ, nên phần cảm nhận ánh sáng (quang trở) thường có mạch IC đề khuếch đại tín hiệu thay đổi này, đưa về các mạch lọc, đếm hoặc các mạch ADC để tính toán ra nhịp tim. Tín hiệu đầu ra là tín hiệu analog, dao động theo các mạch đập của tim.
d. Cấu tạo
Gồm 2 thành phần là một đầu phát quang là bóng hồng ngoại (bước sóng 609nm), và một quang trở nhạy với bước sóng ánh sáng mà đầu phát phát ra.
e. Ứng dụng
Nhịp đập của tim là thông số rất quan trọng xây dựng 1 bài tập thể dục thật sự khoa học. Trước đây, cảm biến nhịp tim chỉ thường xuất hiện trên các thiết bị đắt tiền như : máy chạy bộ, máy đo trong bệnh viện, smartphone,..v.v.v…. Giờ đây đã xuất hiện 1 loại cảm biến đo nhịp tim mà chúng ta dễ dàng kết nối với các bo mạch điện tử như Arduino, Raspberry Pi và các MCU khác.
Cảm biến nhịp tim dạng quang Pulse Sensor sử dụng nguyên lý đo nhịp tim bằng ánh sáng với kích thước nhỏ gọn và giao tiếp Analog rất dễ sử dụng, phù hợp cho các ứng dụng điện tử y sinh.
1.3 LCD 1602 cho mạch đọc cảm biến nhịp tim quang Pulse Sensor giao tiếp Atmega
a. Giới thiệu
Màn hình text LCD1602 xanh lá sử dụng driver HD44780, có khả năng hiển thị 2 dòng với mỗi dòng 16 ký tự, màn hình có độ bền cao, rất phổ biến, nhiều code mẫu và dễ sử dụng thích hợp cho những người mới học và làm dự án.
b. Thông số kỹ thuật
Điện áp hoạt động là 5 V.
Kích thước: 80 x 36 x 12.5 mm
Chữ đen, nền xanh lá
Khoảng cách giữa hai chân kết nối là 0.1 inch tiện dụng khi kết nối với Breadboard.
Tên các chân được ghi ở mặt sau của màn hình LCD hổ trợ việc kết nối, đi dây điện.
Có đèn led nền, có thể dùng biến trở hoặc PWM điều chình độ sáng để sử dụng ít điện năng hơn.
Có thể được điều khiển với 6 dây tín hiệu
Có bộ ký tự được xây dựng hổ trợ tiếng Anh và tiếng Nhật, xem thêm HD44780 datasheet để biết thêm chi tiết.
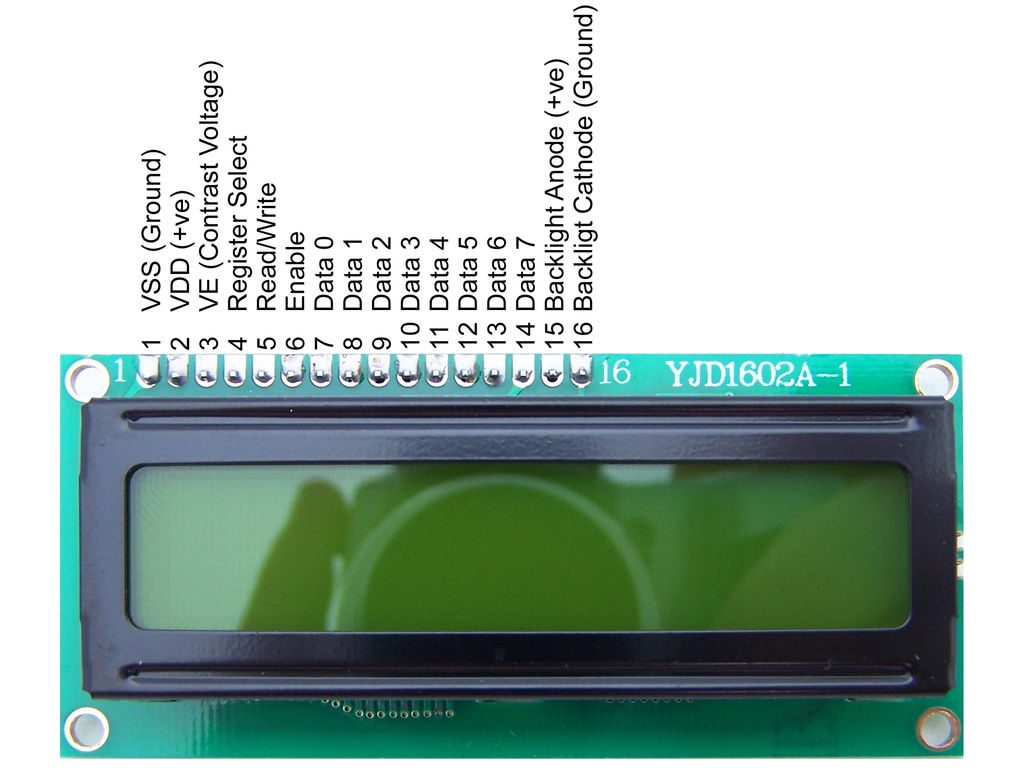
c. Sơ đồ chân LCD 16×2
Số chân
Ký hiệu chân
Mô tả chân
1
Vss
Cấp điện 0v
2
Vcc
Cấp điện 5v
3
V0
Chỉnh độ tương phản
4
RS
Lựa chọn thanh ghi địa chỉ hay dữ liệu
5
RW
Lựa chọn thanh ghi Đọc hay Viết
6
EN
Cho phép xuất dữ liệu
7
D0
Đường truyền dữ liệu 0
8
D1
Đường truyền dữ liệu 1
9
D2
Đường truyền dữ liệu 2
10
D3
Đường truyền dữ liệu 3
11
D4
Đường truyền dữ liệu 4
12
D5
Đường truyền dữ liệu 5
13
D6
Đường truyền dữ liệu 6
14
D7
Đường truyền dữ liệu 7
15
A
Chân dương đèn màn hình
16
K
Chân âm đèn màn hình
Trong 16 chân của LCD được chia ra làm 3 dạng tín hiệu như sau:
Các chân cấp nguồn: Chân số 1 là chân nối mass (0V), chân thứ 2 là Vdd nối với nguồn+5V. Chân thứ 3 dùng để chỉnh contrast thường nối với biến trở.
Các chân điều khiển: Chân số 4 là chân RS dùng để điều khiển lựa chọn thanh ghi. ChânR/W dùng để điều khiển quá trình đọc và ghi. Chân E là chân cho phép dạng xung chốt.
Các chân dữ liệu D7÷D0: Chân số 7 đến chân số 14 là 8 chân dùng để trao đổi dữ liệu giữa thiết bị điều khiển và LCD.
d. Địa chỉ ba vùng nhớ
Bộ điều khiển LCD có ba vùng nhớ nội, mỗi vùng có chức năng riêng. Bộ điều khiển phải khởi động trước khi truy cập bất kỳ vùng nhớ nào. a. Bộ nhớ DDRAM
Bộ nhớ chứa dữ liệu để hiển thị (Display Data RAM: DDRAM) lưu trữ những mã ký tự để hiển thị lên màn hình. Mã ký tự lưu trữ trong vùng DDRAM sẽ tham chiếu với từng bitmap kí tự được lưu trữ trong CGROM đã được định nghĩa trước hoặc đặt trong vùng do người sử dụng định nghĩa. b. Bộ phát kí tự ROM – CGROM
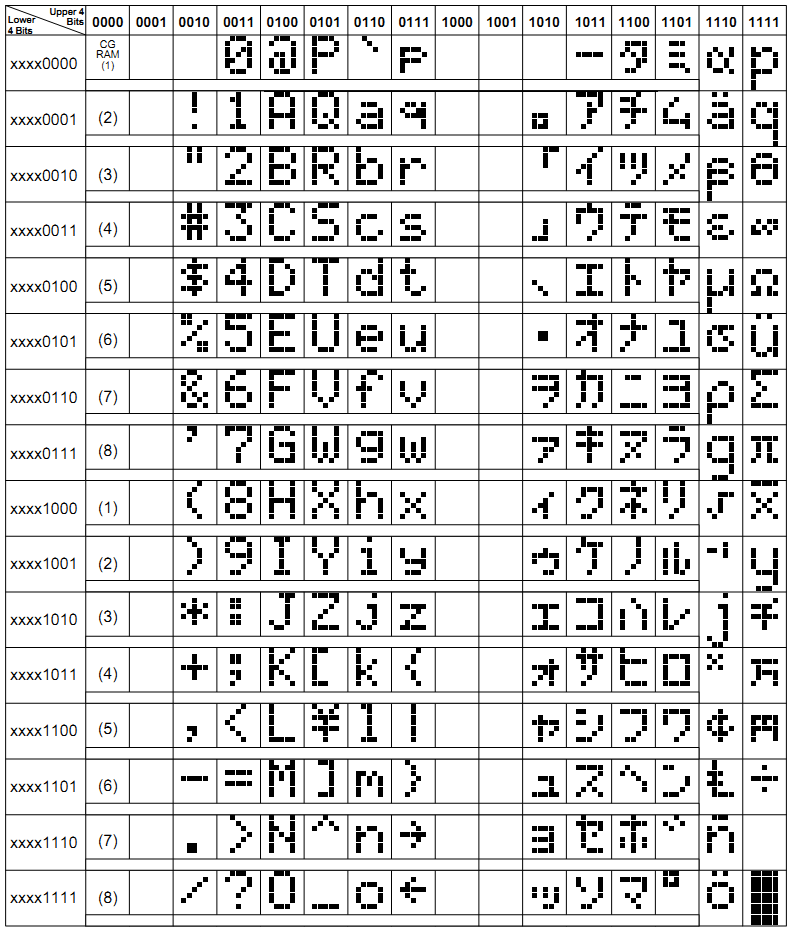
Bộ phát kí tự ROM (Character Generator ROM: CGROM) chứa các kiểu bitmap cho mỗi kí tự được định nghĩa trước mà LCD có thể hiển thị, như được trình bày bảng mã ASCII. Mã kí tự lưu trong DDRAM cho mỗi vùng kí tự sẽ được tham chiếu đến một vị trí trong CGROM. Ví dụ: mã kí tự số hex 0x53 lưu trong DDRAM được chuyển sang dạng nhị phân 4 bit cao là DB[7:4] = “0101” và 4 bit thấp là DB[3:0] = “0011” chính là kí tự chữ ‘S’ sẽ hiển thị trên màn hình LCD. c. Bộ phát kí tự RAM – CGRAM
Bộ phát kí tự RAM (Character Generator RAM: CG RAM) cung cấp vùng nhớ để tạo ra 8 kí tự tùy ý. Mỗi kí tự gồm 5 cột và 8 hàng.
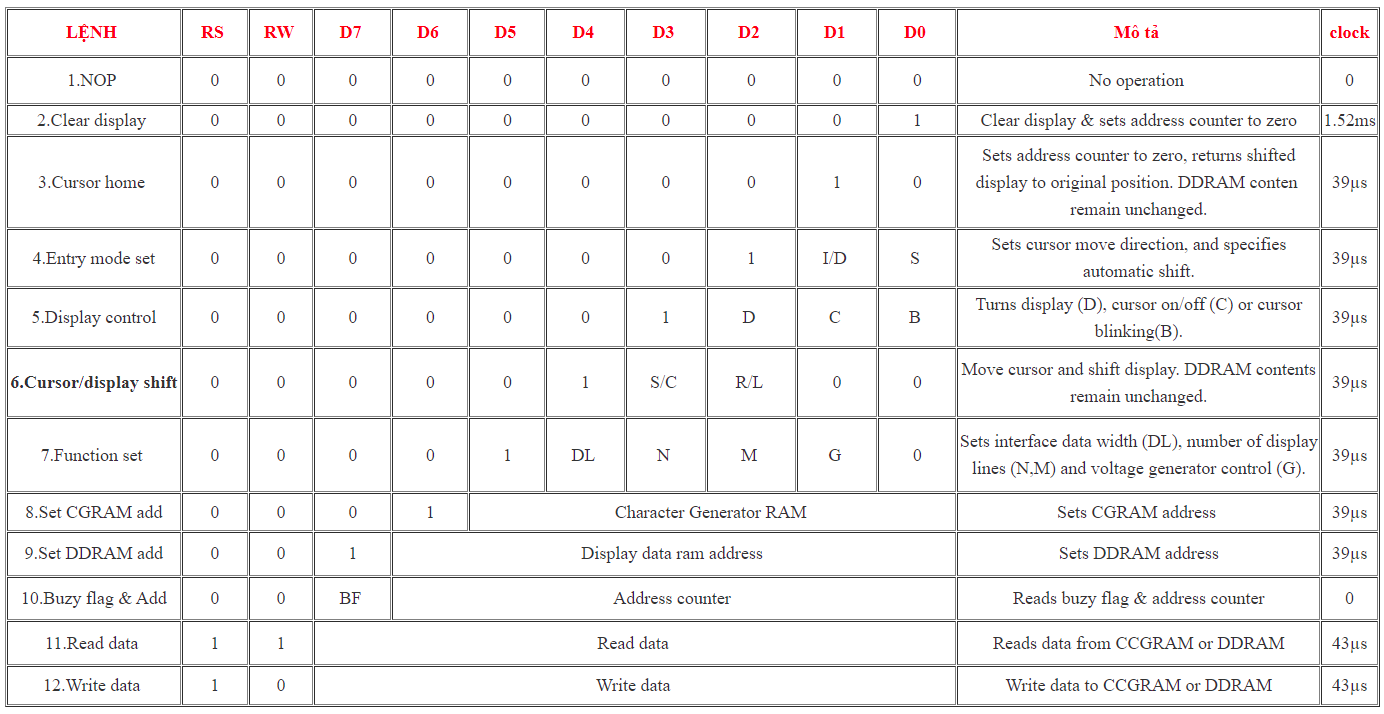
e. Các lệnh điều khiển của LCD
Lệnh thiết lập chức năng giao tiếp “Function set”:
Bit DL (data length) = 1 thì cho phép giao tiếp 8 đường data D7 ÷ D0, nếu bằng 0 thì cho phép giao tiếp 4 đường D7 ÷ D4.
Bit N (number of line) = 1 thì cho phép hiển thị 2 hàng, nếu bằng 0 thì cho phép hiển thị 1 hàng.
Bit F (font) = 1 thì cho phép hiển thị với ma trận 5×8, nếu bằng 0 thì cho phép hiển thị với ma trận 5×11.
Các bit cao còn lại là hằng số không đổi.
Lệnh xoá màn hình “Clear Display”: khi thực hiện lệnh này thì LCD sẽ bị xoá và bộ đếm địa chỉ được xoá về 0.
Lệnh di chuyển con trỏ về đầu màn hình “Cursor Home”: khi thực hiện lệnh này thì bộ đếm địa chỉ được xoá về 0, phần hiển thị trở về vị trí gốc đã bị dịch trước đó. Nội dung bộ nhớ RAM hiển thị DDRAM không bị thay đổi.
Lệnh thiết lập lối vào “Entry mode set”: lệnh này dùng để thiết lập lối vào cho các kí tự hiển thị,
Bit I/D = 1 thì con trỏ tự động tăng lên 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị, khi I/D = 0 thì con trỏ sẽ tự động giảm đi 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị.
Bit S = 1 thì cho phép dịch chuyển dữ liệu mỗi khi nhận 1 byte hiển thị.
Lệnh điều khiển con trỏ hiển thị “Display Control”:
Bit D: cho phép LCD hiển thị thì D = 1, không cho hiển thị thì bit D = 0.
Bit C: cho phép con trỏ hiển thị thì C= 1, không cho hiển thị con trỏ thì bit C = 0.
Bit B: cho phép con trỏ nhấp nháy thì B= 1, không cho con trỏ nhấp nháy thì bit B = 0.
Với các bit như trên thì để hiển thị phải cho D = 1, 2 bit còn lại thì tùy chọn, trong thư viện thì cho 2 bit đều bằng 0, không cho phép mở con trỏ và nhấp nháy, nếu bạn không thích thì hiệu chỉnh lại.
Lệnh di chuyển con trỏ “Cursor /Display Shift”: lệnh này dùng để điều khiển di chuyển con trỏ hiển thị dịch chuyển
Bit SC: SC = 1 cho phép dịch chuyển, SC = 0 thì không cho phép.
Bit RL xác định hướng dịch chuyển: RL = 1 thì dịch phải, RL = 0 thì dịch trái. Nội dung bộ nhớ DDRAM vẫn không đổi.
Vậy khi cho phép dịch thì có 2 tùy chọn: dịch trái và dịch phải.
Lệnh thiết lập địa chỉ cho bộ nhớ RAM phát kí tự “Set CGRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM phát kí tự.
Lệnh thiết lập địa chỉ cho bộ nhớ RAM hiển thị “Set DDRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM lưu trữ các dữ liệu hiển thị.
Hai lệnh cuối cùng là lệnh đọc và lệnh ghi dữ liệu LCD.
f. Bảng mã ASCII sử dụng cho LCD
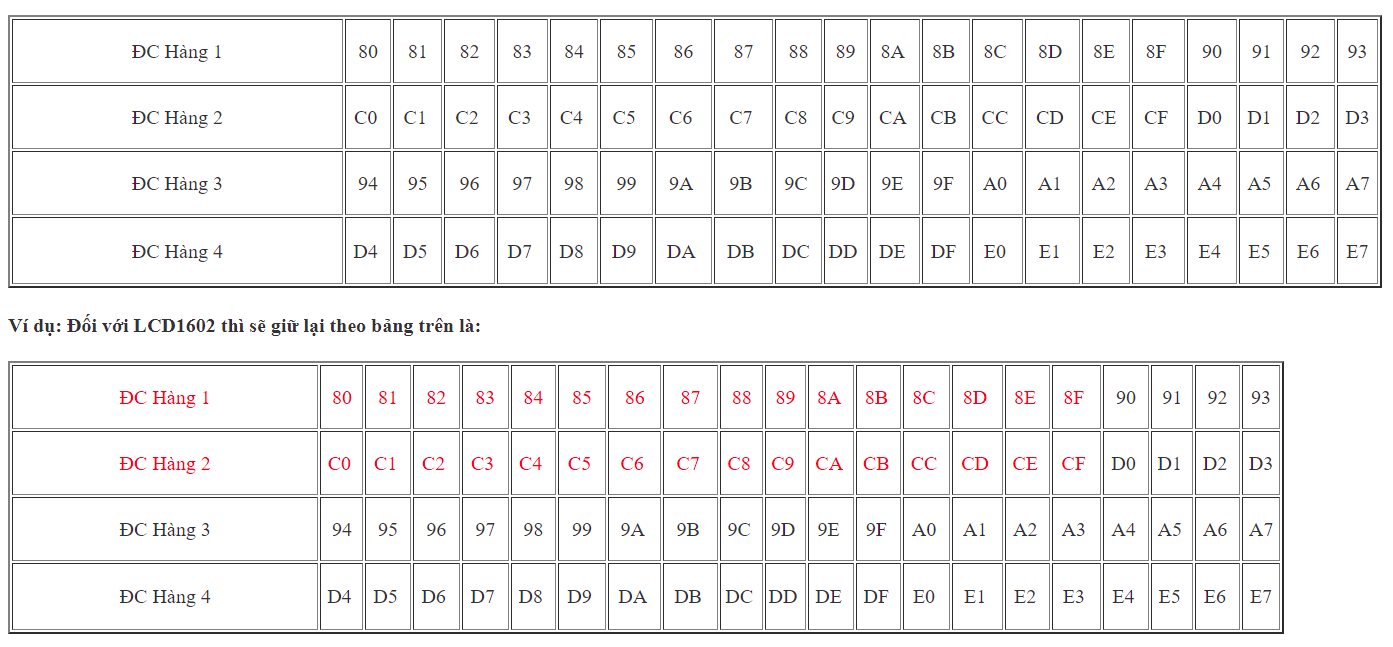
g. Bảng địa chỉ cho LCD
2. Hướng dẫn đồ án cảm biến nhịp tim quang Pulse Sensor giao tiếp Atmega hiển thị LCD1602
Phần này chưa được chia sẻ.
LIÊN HỆ thông tin ở TẠI ĐÂY để được hổ trợ tốt hơn.
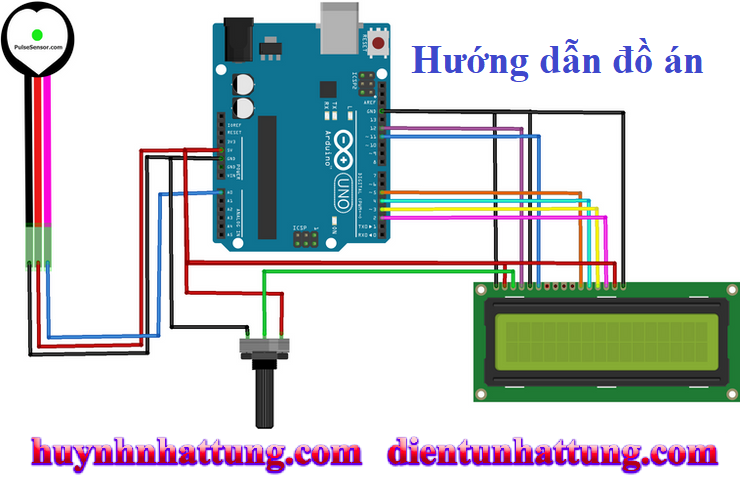
Phần cứng
Phần mềm
#include <LiquidCrystal.h>const int rs = 12, en = 11, d4 = 5, d5 = 4, d6 = 3, d7 = 2;LiquidCrystal lcd(12, 11, 5, 4, 3, 2);int pulsePin = A0; // Pulse Sensor purple wire connected to analog pin A0int blinkPin = 13; // pin to blink led at each beat// Volatile Variables, used in the interrupt service routine!volatile int BPM; // int that holds raw Analog in 0. updated every 2mSvolatile int Signal; // holds the incoming raw datavolatile int IBI = 600; // int that holds the time interval between beats! Must be seeded! volatile boolean Pulse = false; // "True" when User's live heartbeat is detected. "False" when not a "live beat". volatile boolean QS = false; // becomes true when Arduoino finds a beat.static boolean serialVisual = true; // Set to 'false' by Default. Re-set to 'true' to see Arduino Serial Monitor ASCII Visual Pulse volatile int rate[10]; // array to hold last ten IBI valuesvolatile unsigned long sampleCounter = 0; // used to determine pulse timingvolatile unsigned long lastBeatTime = 0; // used to find IBIvolatile int P = 512; // used to find peak in pulse wave, seededvolatile int T = 512; // used to find trough in pulse wave, seededvolatile int thresh = 525; // used to find instant moment of heart beat, seededvolatile int amp = 100; // used to hold amplitude of pulse waveform, seededvolatile boolean firstBeat = true; // used to seed rate array so we startup with reasonable BPMvolatile boolean secondBeat = false; // used to seed rate array so we startup with reasonable BPMvoid setup(){ pinMode(blinkPin,OUTPUT); // pin that will blink to your heartbeat! Serial.begin(115200); // we agree to talk fast! interruptSetup(); // sets up to read Pulse Sensor signal every 2mS // IF YOU ARE POWERING The Pulse Sensor AT VOLTAGE LESS THAN THE BOARD VOLTAGE, // UN-COMMENT THE NEXT LINE AND APPLY THAT VOLTAGE TO THE A-REF PIN // analogReference(EXTERNAL); lcd.begin(16, 2); lcd.clear();}// Where the Magic Happensvoid loop(){ serialOutput(); if (QS == true) // A Heartbeat Was Found { // BPM and IBI have been Determined // Quantified Self "QS" true when arduino finds a heartbeat serialOutputWhenBeatHappens(); // A Beat Happened, Output that to serial. QS = false; // reset the Quantified Self flag for next time } delay(20); // take a break}void interruptSetup(){ // Initializes Timer2 to throw an interrupt every 2mS. TCCR2A = 0x02; // DISABLE PWM ON DIGITAL PINS 3 AND 11, AND GO INTO CTC MODE TCCR2B = 0x06; // DON'T FORCE COMPARE, 256 PRESCALER OCR2A = 0X7C; // SET THE TOP OF THE COUNT TO 124 FOR 500Hz SAMPLE RATE TIMSK2 = 0x02; // ENABLE INTERRUPT ON MATCH BETWEEN TIMER2 AND OCR2A sei(); // MAKE SURE GLOBAL INTERRUPTS ARE ENABLED } void serialOutput(){ // Decide How To Output Serial. if (serialVisual == true) { arduinoSerialMonitorVisual('-', Signal); // goes to function that makes Serial Monitor Visualizer } else { sendDataToSerial('S', Signal); // goes to sendDataToSerial function } }void serialOutputWhenBeatHappens(){ if (serialVisual == true) // Code to Make the Serial Monitor Visualizer Work { Serial.print(" Heart-Beat Found "); //ASCII Art Madness Serial.print("BPM: "); Serial.println(BPM); lcd.print("Heart-Beat Found "); lcd.setCursor(1,1); lcd.print("BPM: "); lcd.setCursor(5,1); lcd.print(BPM); delay(300); lcd.clear(); } else { sendDataToSerial('B',BPM); // send heart rate with a 'B' prefix sendDataToSerial('Q',IBI); // send time between beats with a 'Q' prefix } }void arduinoSerialMonitorVisual(char symbol, int data ){ const int sensorMin = 0; // sensor minimum, discovered through experiment const int sensorMax = 1024; // sensor maximum, discovered through experiment int sensorReading = data; // map the sensor range to a range of 12 options: int range = map(sensorReading, sensorMin, sensorMax, 0, 11); // do something different depending on the // range value:}void sendDataToSerial(char symbol, int data ){ Serial.print(symbol); Serial.println(data); }ISR(TIMER2_COMPA_vect) //triggered when Timer2 counts to 124{ cli(); // disable interrupts while we do this Signal = analogRead(pulsePin); // read the Pulse Sensor sampleCounter += 2; // keep track of the time in mS with this variable int N = sampleCounter - lastBeatTime; // monitor the time since the last beat to avoid noise // find the peak and trough of the pulse wave if(Signal < thresh && N > (IBI/5)*3) // avoid dichrotic noise by waiting 3/5 of last IBI { if (Signal < T) // T is the trough { T = Signal; // keep track of lowest point in pulse wave } } if(Signal > thresh && Signal > P) { // thresh condition helps avoid noise P = Signal; // P is the peak } // keep track of highest point in pulse wave // NOW IT'S TIME TO LOOK FOR THE HEART BEAT // signal surges up in value every time there is a pulse if (N > 250) { // avoid high frequency noise if ( (Signal > thresh) && (Pulse == false) && (N > (IBI/5)*3) ) { Pulse = true; // set the Pulse flag when we think there is a pulse digitalWrite(blinkPin,HIGH); // turn on pin 13 LED IBI = sampleCounter - lastBeatTime; // measure time between beats in mS lastBeatTime = sampleCounter; // keep track of time for next pulse if(secondBeat) { // if this is the second beat, if secondBeat == TRUE secondBeat = false; // clear secondBeat flag for(int i=0; i<=9; i++) // seed the running total to get a realisitic BPM at startup { rate[i] = IBI; } } if(firstBeat) // if it's the first time we found a beat, if firstBeat == TRUE { firstBeat = false; // clear firstBeat flag secondBeat = true; // set the second beat flag sei(); // enable interrupts again return; // IBI value is unreliable so discard it } // keep a running total of the last 10 IBI values word runningTotal = 0; // clear the runningTotal variable for(int i=0; i<=8; i++) { // shift data in the rate array rate[i] = rate[i+1]; // and drop the oldest IBI value runningTotal += rate[i]; // add up the 9 oldest IBI values } rate[9] = IBI; // add the latest IBI to the rate array runningTotal += rate[9]; // add the latest IBI to runningTotal runningTotal /= 10; // average the last 10 IBI values BPM = 60000/runningTotal; // how many beats can fit into a minute? that's BPM! QS = true; // set Quantified Self flag // QS FLAG IS NOT CLEARED INSIDE THIS ISR } } if (Signal < thresh && Pulse == true) { // when the values are going down, the beat is over digitalWrite(blinkPin,LOW); // turn off pin 13 LED Pulse = false; // reset the Pulse flag so we can do it again amp = P - T; // get amplitude of the pulse wave thresh = amp/2 + T; // set thresh at 50% of the amplitude P = thresh; // reset these for next time T = thresh; } if (N > 2500) { // if 2.5 seconds go by without a beat thresh = 512; // set thresh default P = 512; // set P default T = 512; // set T default lastBeatTime = sampleCounter; // bring the lastBeatTime up to date firstBeat = true; // set these to avoid noise secondBeat = false; // when we get the heartbeat back } sei(); // enable interrupts when youre done!}// end isr
3. Hoạt động của mạchđọc cảm biến nhịp tim quang Pulse Sensor giao tiếp Atmega
Khi cấp điện hệ thống hoạt động, vi điều khiển hiển thị thông tin ban đầu. Lúc này vi điều khiển chờ tín hiệu từ cảm biến nhịp tim trả về. Khi nhận được tín hiệu vi điều khiển xử lý và xuất giá trị cảm biến nhịp ra LCD theo đơn vị BPM.
4. Cụ thể hoạt động của mạch đọc cảm biến nhịp tim quang Pulse Sensor giao tiếp Atmega:
 Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …
Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …