L3G4200 giao tiếp Pic16F dùng Cảm biến Gyro 3 trục L3G4200D được sử dụng để đo góc quay của vật thể gắn cảm biến theo ba trục x, y, z, cảm biến có độ phân giải rất cao (16 bit) có để đo ở tốc độ 2000 độ/giây (dps) ổn định mà không bị ảnh hưởng bởi nhiệt độ hơn nhiều loại cảm biến có sẵn trên thị trường hiện nay.Cảm biến Gyro 3 trục L3G4200D có thể giao tiếp qua giao tiếp I2C hoặc SPI, nếu xử dụng giao tiếp I2C các bạn chỉ cần hàn 1 số jumper để chọn địa chỉ trên board, cảm biến còn tích hợp thêm 32 thanh ghi buffer FIFO giúp bạn có thể truy xuất dữ liệu nhanh và thuận tiện hơn làm giảm độ xử lý của Vi điều khiển.
Liên hệ làm Đồ án và Mạch điện tửPhone : 0967.551.477Zalo : 0967.551.477FB : Huỳnh Nhật TùngEmail : dientunhattung@gmail.comĐịa Chỉ: 171/25 Lê Văn Thọ, P8, Gò Vấp, Tp HCMChi tiết: Nhận làm mạch và đồ án Điện tử
Table of Contents
1. Linh kiện cần thiết làm mạch cảm biến gia tốc L3G4200 giao tiếp Pic16F
1.1 Vi điều khiển PIC trong mạch cảm biến gia tốc L3G4200 giao tiếp Pic16F
a. Giới thiệu
PIC là một họ vi điều khiển RISC được sản xuất bởi công ty Microchip Technology.
Dòng PIC đầu tiên là PIC1650 sau đó phát triển lên nhiều dòng khác nhau như:
Pic10F
Pic12F
Pic16F
Pic18F
Pic24F
Pic32F
Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của
máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …
b. Đặc điểm thực thi tốc độ cao CPU RISC là:
Có 35 lệnh đơn.
Thời gian thực hiện tất cả các lệnh là 1 chu kì máy, ngoại trừ lệnh rẽ nhánh là 2.
Tốc độ hoạt động: + Ngõ vào xung clock có tần số 20MHz.+ Chu kì lệnh thực hiện lệnh 200ns.
Có nhiều nguồn ngắt.
Có 3 kiểu định địa chỉ trực tiếp, gián tiếp và tức thời.
c. Cấu trúc đặc biệt của vi điều khiển
Bộ dao động nội chính xác + Sai số ± 1%+ Có thể lựa chọn tần số từ 31 kHz đến 8 Mhz bằng phần mềm.+ Cộng hưởng bằng phần mềm.+ Chế độ bắt đầu 2 cấp tốc độ.+ Mạch phát hiện hỏng dao động thạch anh cho các ứng dụng quan trọng.+ Có chuyển mạch nguồn xung clock trong quá trình hoạt động để tiết kiệm công suất.
Có chế độ ngủ để tiết kiệm công suất.
Dãy điện áp hoạt động rộng từ 2V đến 5,5V.
Tầm nhiệt độ làm việc theo chuẩn công nghiệp.
Có mạch reset khi có điện (Power On Reset – POR).
Có bộ định thời chờ ổn định điện áp khi mới có điện (Power up Timer – PWRT) và bộ định thời chờ dao động hoạt động ổn định khi mới cấp điện (Oscillator Startup Timer – OST).
Có mạch tự động reset khi phát hiện nguồn điện cấp bị sụt giảm, cho phép lựa chọn bằng phần mềm (Brown out Reset – BOR).
Có bộ định thời giám sát (Watchdog Timer – WDT) dùng dao động trong chip cho phép bằng phần mềm (có thể định thời lên đến 268 giây).
Đa hợp ngõ vào reset với ngõ vào có điện trở kéo lên.
Có bảo vệ code đã lập trình.
Bộ nhớ Flash cho phép xóa và lập trình 100,000 lần.
Bộ nhớ Eeprom cho phép xóa và lập trình 1,000,000 lần và có thể tồn tại trên 40 năm.
Cho phép đọc/ghi bộ nhớ chương trình khi mạch hoạt động.
Có tích hợp mạch gỡ rối.
d. Cấu trúc nguồn công suất thấp
Chế độ chờ: dòng tiêu tán khoảng 50nA, sử dụng nguồn 2V.
Dòng hoạt động. + 11µA ở tần số hoạt động 32kHz, sử dụng nguồn 2V. + 220µA ở tần số hoạt động 4MHz, sử dụng nguồn 2V.
Bộ định thời Watchdog Timer khi hoạt động tiêu thụ 1,4µA, điện áp 2V.
e. Cấu trúc ngoại vi
Có 35 chân I/O cho phép lựa chọn hướng độc lập: + Mỗi ngõ ra có thể nhận/cấp dòng lớn khoảng 25mA nên có thể trực tiếp điều khiển led+ Có các port báo ngắt khi có thay đổi mức logic. + Có các port có điện trở kéo lên bên trong có thể lập trình. + Có ngõ vào báo thức khỏi chế độ công suất cực thấp.
Có module so sánh tương tự: + Có 2 bộ so sánh điện áp tương tự + Có module nguồn điện áp tham chiếu có thể lập trình. + Có nguồn điện áp tham chiếu cố định có giá trị bằng 0,6V. + Có các ngõ vào và các ngõ ra của bộ so sánh điện áp. + Có chế độ chốt SR.
Có bộ chuyển đổi tương tự sang số: Có 14 bộ chuyển đổi tương tự với độ phân giải 10 bit.
Có timer0: 8 bit hoạt động định thời/đếm xung ngoại có bộ chia trước có thể lập trình.
Có timer1: + 16 bit hoạt động định thời/đếm xung ngoại có bộ chia trước có thể lập trình. + Có ngõ vào cổng của timer1 để có thể điều khiển timer1 đếm từ tín hiệu bên ngoài. + Có bộ dao động công suất thấp có tần số 32kHz.
Có timer2: 8 bit hoạt động định thời với thanh ghi chu kỳ, có bộ chia trước và chia sau.
Có module capture, compare và điều chế xung PWM+ nâng cao + Có bộ capture 16 bit có thể đếm được xung với độ phân giải cao nhất là 12,5ns. + Có bộ điều chế xung PWM với số kênh ngõ ra là 1, 2 hoặc 4, có thể lập trình với tần số lớn nhất là 20kHz. + Có ngõ ra PWM điều khiển lái.
Có module capture, compare và điều chế xung PWM + Có bộ capture 16 bit có thể đếm được xung với chu kỳ cao nhất là 12,5ns. + Có bộ so sánh 16 bit có thể so sánh xung đếm với chu kỳ lớn nhất là 200ns + Có bộ điều chế xung PWM có thể lập trình với tần số lớn nhất là 20kHz.
Có thể lập trình trên bo ISP thông qua 2 chân.
Có module truyền dữ liệu nối tiếp đồng bộ MSSP hổ trợ chuẩn truyền 3 dây SPI, chuẩn I2C ở 2 chế độ chủ và tớ.
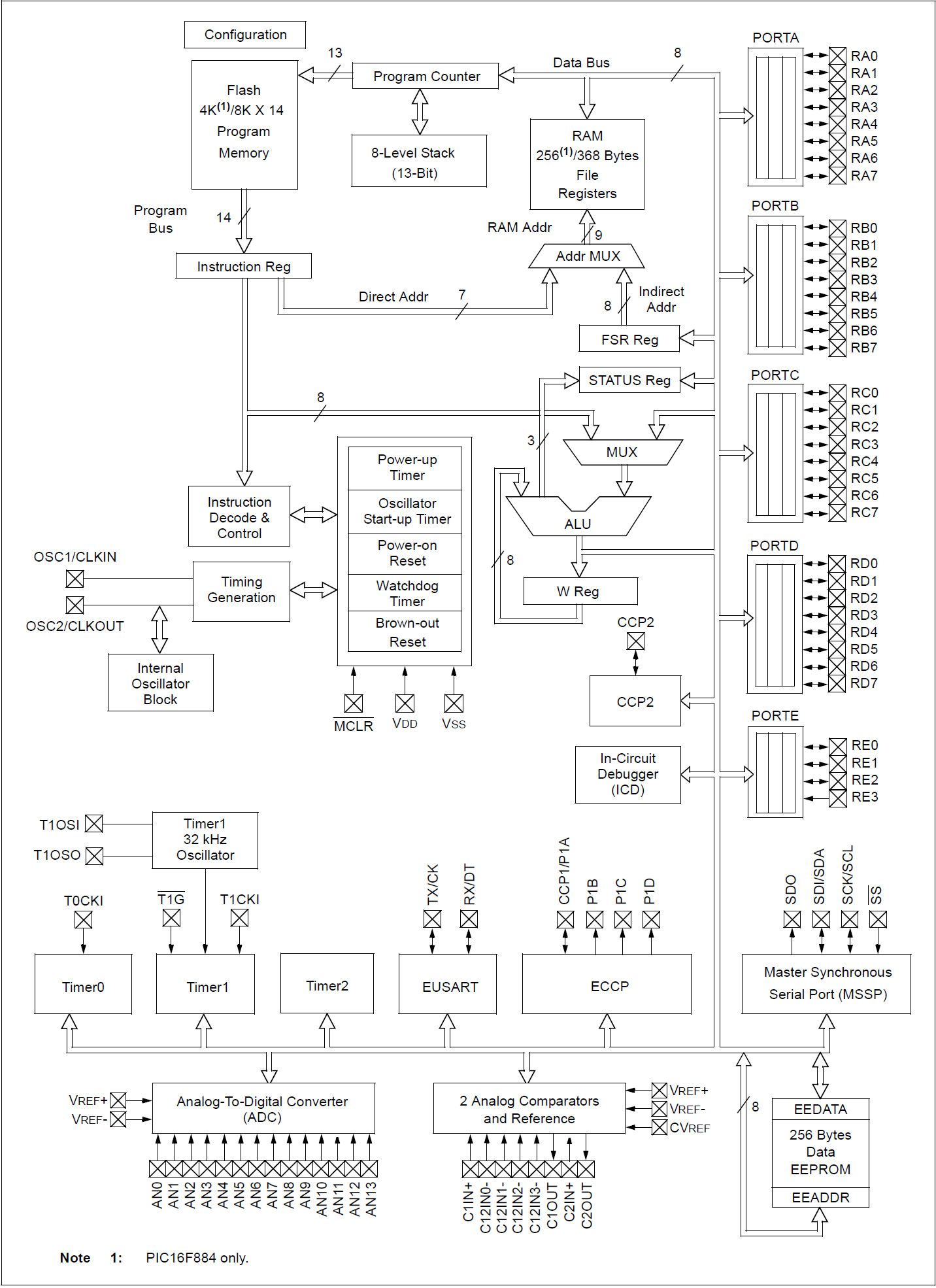
f. Cấu trúc của vi điều khiển
Các khối bên trong vi điều khiển bao gồm:
Có khối thanh ghi định cấu hình cho vi điều khiển.
Có khối bộ nhớ chương trình có nhiều dung lượng cho 5 loại khác nhau.
Có khối bộ nhớ ngăn xếp 8 cấp (8 level stack).
Có khối bộ nhớ Ram cùng với thanh ghi FSR để tính toán tạo địa chỉ cho 2 cách truy xuất gián tiếp và trực tiếp.
Có thanh ghi lệnh (Instruction register) dùng để lưu mã lệnh nhận về từ bộ nhớ chương trình.
g. Cấu hình bên trong của vi điều khiển
Có thanh ghi trạng thái (status register) cho biết trạng thái sau khi tính toán của khối
ALU.
Có thanh ghi FSR.
Có khối ALU cùng với thanh ghi working hay thanh ghi A để xử lý dữ liệu.
Có khối giải mã lệnh và điều khiển (Instruction Decode and Control).
Có khối dao động nội (Internal Oscillator Block).
Có khối dao động kết nối với 2 ngõ vào OSC1 và OSC2 để tạo dao động.
Có khối các bộ định thời khi cấp điện PUT, có bộ định thời chờ dao động ổn định, có mạch reset khi có điện, có bộ định thời giám sát watchdog, có mạch reset khi phát hiện sụt giảm nguồn.
Có khối bộ dao động cho timer1 có tần số 32kHz kết nối với 2 ngõ vào T1OSI và T1OSO.
Có khối CCP2 và ECCP.
Có khối mạch gỡ rối (In-Circuit Debugger IDC).
Có khối timer0 với ngõ vào xung đếm từ bên ngoài là T0CKI.
Có khối truyền dữ liệu đồng bộ/bất đồng bộ nâng cao.
Có khối truyền dữ liệu đồng bộ MSSP cho SPI và I2C.
Có khối bộ nhớ Eeprom 256 byte và thanh ghi quản lý địa chỉ EEADDR và thanh ghi dữ liệu EEDATA.
Có khối chuyển đổi tín hiệu tương tự sang số ADC.
Có khối 2 bộ so sánh với nhiều ngõ vào ra và điện áp tham chiếu.
Có khối các port A, B, C, E và D
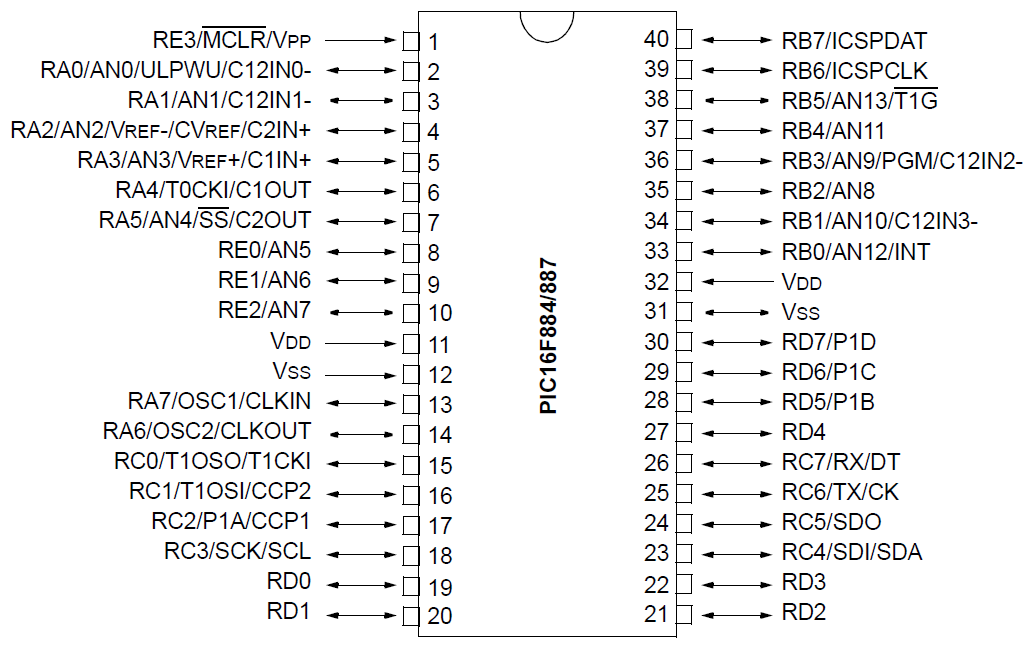
a. Chức năng các chân của portA
Chân RA0/AN0/ULPWU/C12IN0- (2): có 4 chức năng: + RA0: xuất/ nhập số – bit thứ 0 của port A. + AN0: ngõ vào tương tự của kênh thứ 0.
Chân RA1/AN1/C12IN1- (3): có 3 chức năng: + RA1: xuất/nhập số – bit thứ 1 của port A. + AN1: ngõ vào tương tự của kênh thứ 1
Chân RA2/AN2/VREF-/CVREF/C2IN+ (4): có 5 chức năng: + RA2: xuất/nhập số – bit thứ 2 của port A. + AN2: ngõ vào tương tự của kênh thứ 2. + VREF-: ngõ vào điện áp chuẩn (thấp) của bộ ADC. + CVREF: điện áp tham chiếu VREF ngõ vào bộ so sánh.
Chân RA3/AN3/VREF+/C1IN+ (5): có 4 chức năng: + RA3: xuất/nhập số – bit thứ 3 của port A. + AN3: ngõ vào tương tự kênh thứ 3. + VREF+: ngõ vào điện áp chuẩn (cao) của bộ A/D. + C1IN+: ngõ vào dương của bộ so sánh C1. + Chân RA4/TOCKI/C1OUT (6): có 3 chức năng:
RA4: xuất/nhập số – bit thứ 4 của port A. + TOCKI: ngõ vào xung clock từ bên ngoài cho Timer0. + C1OUT: ngõ ra bộ so sánh 1. + Chân RA5/AN4/ SS / C2OUT (7): có 4 chức năng: + RA5: xuất/nhập số – bit thứ 5 của port A. + AN4: ngõ vào tương tự kênh thứ 4.+ SS : ngõ vào chọn lựa SPI tớ (Slave SPI device). + C2OUT: ngõ ra bộ so sánh 2.
Chân RA6/OSC2/CLKOUT (14): có 3 chức năng: + RA6: xuất/nhập số – bit thứ 6 của port A.+ OSC2: ngõ ra dao động thạch anh. Kết nối đến thạch anh hoặc bộ cộng hưởng.
Chân RA7/OSC1/CLKIN (13): có 3 chức năng. + RA7: xuất/nhập số – bit thứ 7 của port A.+ OSC1: ngõ vào dao động thạch anh hoặc ngõ vào nguồn xung ở bên ngoài.
b. Chức năng các chân của portB
Chân RB0/AN12/INT (33): có 3 chức năng: + RB0: xuất/nhập số – bit thứ 0 của port B. + AN12: ngõ vào tương tự kênh thứ 12. + INT: ngõ vào nhận tín hiệu ngắt ngoài. + Chân RB1/AN10/C12IN3- (34): có 3 chức năng:
RB1: xuất/nhập số – bit thứ 1 của port B. + AN10: ngõ vào tương tự kênh thứ 10. + C12IN3-: ngõ vào âm thứ 3 của bộ so sánh C1 hoặc C2. + Chân RB2/AN8 (35): có 2 chức năng:
RB2: xuất/nhập số – bit thứ 2 của port B. + AN8: ngõ vào tương tự kênh thứ 8. + Chân RB3/AN9/PGM/C12IN2 (36): có 4 chức năng:
RB3: xuất/nhập số – bit thứ 3 của port B. + AN9: ngõ vào tương tự kênh thứ 9. + PGM: Chân cho phép lập trình điện áp thấp ICSP. + C12IN1-: ngõ vào âm thứ 2 của bộ so sánh C1 hoặc C2 + Chân RB4/AN11 (37): có 2 chức năng:
RB4: xuất/nhập số – bit thứ 4 của port B. + AN11: ngõ vào tương tự kênh thứ 11. + Chân RB5/ AN13/T1G (38): có 3 chức năng:
RB5: xuất/nhập số – bit thứ 5 của port B. + AN13: ngõ vào tương tự kênh thứ 13. + T1G (Timer1 gate input): ngõ vào Gate cho phép time1 đếm dùng để đếm độ rộng xung. + Chân RB6/ICSPCLK (39): có 2 chức năng:
RB6: xuất/nhập số. + ICSPCLK: xung clock lập trình nối tiếp. + Chân RB7/ICSPDAT (40): có 2 chức năng:
RB7: xuất/nhập số. + ICSPDAT: ngõ xuất nhập dữ liệu lập trình nối tiếp.
c. Chức năng các chân của portC
Chân RC0/T1OSO/T1CKI (15): có 3 chức năng: + RC0: xuất/nhập số – bit thứ 0 của port C. + T1OSO: ngõ ra của bộ dao động Timer1. + T1CKI: ngõ vào xung clock từ bên ngoài Timer1.
Chân RC1/T1OSI/CCP2 (16): có 3 chức năng: + RC1: xuất/nhập số – bit thứ 1 của port C. + T1OSI: ngõ vào của bộ dao động Timer1. + CCP2: ngõ vào Capture2, ngõ ra compare2, ngõ ra PWM2.
Chân RC2 /P1A/CCP1 (17): có 3 chức năng: + RC2: xuất/nhập số – bit thứ 2 của port C. + P1A: ngõ ra PWM. + CCP1: ngõ vào Capture1, ngõ ra compare1, ngõ ra PWM1.
Chân RC3/SCK/SCL (18): có 3 chức năng: + RC3: xuất/nhập số – bit thứ 3 của port C. + SCK: ngõ vào xung clock nối tiếp đồng bộ/ngõ ra của chế độ SPI. + SCL: ngõ vào xung clock nối tiếp đồng bộ/ngõ ra của chế độ I2C.
Chân RC4/SDI/SDA (23): có 3 chức năng: + RC4: xuất/nhập số – bit thứ 4 của port C. + SDI: ngõ vào dữ liệu trong truyền dữ liệu kiểu SPI. + SDA: xuất/nhập dữ liệu I2C.
Chân RC5/SDO (24): có 2 chức năng: + RC5: xuất/nhập số – bit thứ 5 của port C. + SDO: ngõ xuất dữ liệu trong truyền dữ liệu kiểu SPI.
Chân RC6/TX/CK (25): có 3 chức năng: + RC6: xuất/nhập số – bit thứ 6 của port C. + TX: ngõ ra phát dữ liệu trong chế độ truyền bất đồng bộ USART. + CK: ngõ ra cấp xung clock trong chế độ truyền đồng bộ USART.
Chân RC7/RX/DT (26): có 3 chức năng: + RC7: xuất/nhập số – bit thứ 7 của port C. + RX: ngõ vào nhận dữ liệu trong chế độ truyền bất đồng bộ EUSART.+ DT: ngõ phát và nhận dữ liệu ở chế độ truyền đồng bộ EUSART.
d. Chức năng các chân của portD
Chân RD0 (19): có 1 chức năng: + RD0: xuất/nhập số – bit thứ 0 của port D.
Chân RD1 (20): có 1 chức năng: + RD1: xuất/nhập số – bit thứ 1 của port D.
Chân RD2 (21): có 1 chức năng: + RD2: xuất/nhập số – bit thứ 2 của port D.
Chân RD3 (22): có 1 chức năng: + RD3: xuất/nhập số – bit thứ 3 của port D.
Chân RD4 (27): có 1 chức năng: + RD4: xuất/nhập số – bit thứ 4 của port D.
Chân RD5/ P1B (28): có 2 chức năng: + RD5: xuất/nhập số – bit thứ 5 của port D. + P1B: ngõ ra PWM.
Chân RD6/ P1C (29): có 2 chức năng: + RD6: xuất/nhập số – bit thứ 6 của port D. + P1C: ngõ ra PWM.
Chân RD7/P1D (30): có 2 chức năng: + RD7: xuất/nhập số – bit thứ 7 của port D. + P1D: ngõ ra tăng cường CPP1
e. Chức năng các chân của portE
Chân RE0/AN5 (8): có 2 chức năng: + RE0: xuất/nhập số. + AN5: ngõ vào tương tự 5.
Chân RE1/AN6 (9): có 2 chức năng: + RE1: xuất/nhập số. + AN6: ngõ vào tương tự kênh thứ 6.
Chân RE2/AN7 (10): có 2 chức năng: + RE2: xuất/nhập số. + AN7: ngõ vào tương tự kênh thứ 7.
Chân RE3/ MCLR /VPP (1): có 3 chức năng: + RE3: xuất/nhập số – bit thứ 3 của port E. + MCLR : là ngõ vào reset tích cực mức thấp. + VPP: ngõ vào nhận điện áp khi ghi dữ liệu vào bộ nhớ nội flash. + Chân VDD (11), (32): + Nguồn cung cấp dương từ 2V đến 5V.+ Chân VSS (12), (31): + Nguồn cung cấp 0V.
1.2 Cảm biến cảm biến gia tốc L3G4200 giao tiếp Pic16F
a. Giới thiệu L3G4200 giao tiếp Pic16F
Cảm biến Gyro 3 trục L3G4200D được sử dụng để đo góc quay của vật thể gắn cảm biến theo ba trục x, y, z, cảm biến có độ phân giải rất cao (16 bit) có để đo ở tốc độ 2000 độ/giây (dps) ổn định mà không bị ảnh hưởng bởi nhiệt độ hơn nhiều loại cảm biến có sẵn trên thị trường hiện nay.Cảm biến Gyro 3 trục L3G4200D có thể giao tiếp qua giao tiếp I2C hoặc SPI, nếu xử dụng giao tiếp I2C các bạn chỉ cần hàn 1 số jumper để chọn địa chỉ trên board, cảm biến còn tích hợp thêm 32 thanh ghi buffer FIFO giúp bạn có thể truy xuất dữ liệu nhanh và thuận tiện hơn làm giảm độ xử lý của Vi điều khiển.Cảm biến Gyro L3G4200D là cảm biến con quay hồi chuyển 3 trục dùng để đo gia tốc gốc, cảm biến có khả năng thay đổi tốc độ ở các mức 250/ 500/ 2000 dps. Cảm biến L3G4200D sẽ đo được vật thể quay được góc bao nhiêu độ quanh 3 trục cố định của nó, khoảng đo có thể được tùy chỉnh tùy theo nhu cầu sử dụng.
b. Thông số kỹ thuật L3G4200 giao tiếp Pic16F
Nguồn sử dụng: 3~5VDC
Điện áp giao tiếp: 3~5VDC
Giao tiếp: I2C hoặc SPI
Đo 3 trục gia tốc góc.
Có thể điều chỉnh độ phân giải (2
Tích hợp chế độ FIFO
Phạm vi đo là ± 2 g, ± 4 g và ± 8 g
Độ phân giải trong phạm vi ± 2 g là 1 mg / LSB
Điều chỉnh tốc độ đo: 250, 500, 2000 dps.
Đo rất nhạy và ổn định.
Kích thước: 24 x 23 x 2 (mm).
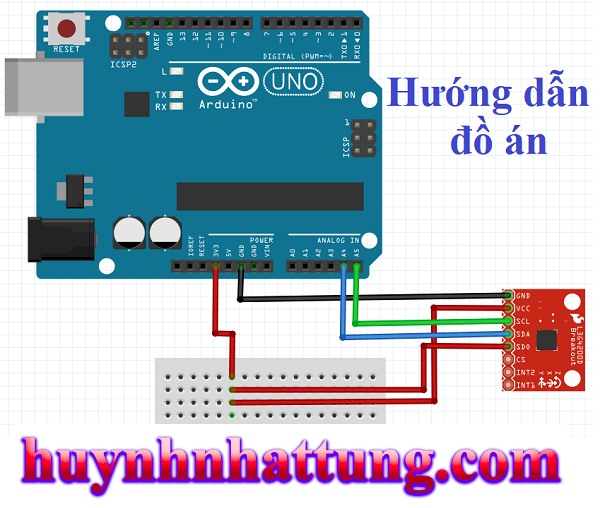
c. Kết nối L3G4200 giao tiếp Pic16F
VCC, GND: Cấp nguồn cho cảm biến hoạt động.
SCL/SCK: Nối với chân SCL của vi điều khiển nếu dùng giao tiếp I2C, nối với chân SCK (xung clock SPI, chân 13 trên Arduino Uno) nếu dùng giao tiếp SPI.
SDA/MOSI: Nối chân SDA của vi điều khiển nếu dùng giao tiếp I2C, nối chân MOSI (chân 11 trên Arduino Uno) nếu dùng SPI.
SDO: Nối với chân MISO (chân 12 trên Arduino Uno) nếu dùng giao tiếp SPI.
CS: Chân dùng với giao thức SPI, mặc định được kéo lên 3.3V, kéo xuống mức LOW để thực hiện giao tiếp qua SPI.
DR: Chân trạng thái dữ liệu. Mức HIGH cho biết dữ liệu đã sẵn sàng, có thể đọc cảm biến. Chân này có thể cài đặt FIFO interrupt.
INT: Programable interrupt.
1.3 LCD1602 cho cảm biến gia tốc L3G4200 giao tiếp Pic16F
a. Giới thiệu
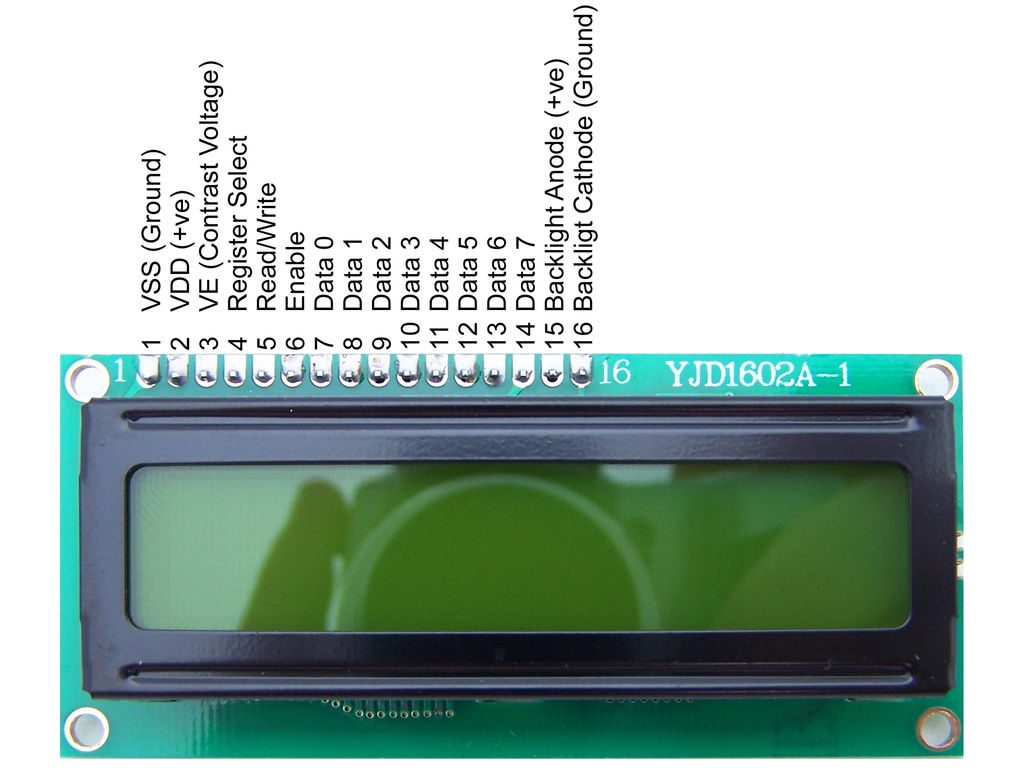
Màn hình text LCD1602 xanh lá sử dụng driver HD44780, có khả năng hiển thị 2 dòng với mỗi dòng 16 ký tự, màn hình có độ bền cao, rất phổ biến, nhiều code mẫu và dễ sử dụng thích hợp cho những người mới học và làm dự án.
b. Thông số kỹ thuật
Điện áp hoạt động là 5 V.
Kích thước: 80 x 36 x 12.5 mm
Chữ đen, nền xanh lá
Khoảng cách giữa hai chân kết nối là 0.1 inch tiện dụng khi kết nối với Breadboard.
Tên các chân được ghi ở mặt sau của màn hình LCD hổ trợ việc kết nối, đi dây điện.
Có đèn led nền, có thể dùng biến trở hoặc PWM điều chình độ sáng để sử dụng ít điện năng hơn.
Có thể được điều khiển với 6 dây tín hiệu
Có bộ ký tự được xây dựng hổ trợ tiếng Anh và tiếng Nhật, xem thêm HD44780 datasheet để biết thêm chi tiết.
c. Sơ đồ chân LCD
Số chân
Ký hiệu chân
Mô tả chân
1
Vss
Cấp điện 0v
2
Vcc
Cấp điện 5v
3
V0
Chỉnh độ tương phản
4
RS
Lựa chọn thanh ghi địa chỉ hay dữ liệu
5
RW
Lựa chọn thanh ghi Đọc hay Viết
6
EN
Cho phép xuất dữ liệu
7
D0
Đường truyền dữ liệu 0
8
D1
Đường truyền dữ liệu 1
9
D2
Đường truyền dữ liệu 2
10
D3
Đường truyền dữ liệu 3
11
D4
Đường truyền dữ liệu 4
12
D5
Đường truyền dữ liệu 5
13
D6
Đường truyền dữ liệu 6
14
D7
Đường truyền dữ liệu 7
15
A
Chân dương đèn màn hình
16
K
Chân âm đèn màn hình
Trong 16 chân của LCD được chia ra làm 3 dạng tín hiệu như sau:
Các chân cấp nguồn: Chân số 1 là chân nối mass (0V), chân thứ 2 là Vdd nối với nguồn+5V. Chân thứ 3 dùng để chỉnh contrast thường nối với biến trở.
Các chân điều khiển: Chân số 4 là chân RS dùng để điều khiển lựa chọn thanh ghi. ChânR/W dùng để điều khiển quá trình đọc và ghi. Chân E là chân cho phép dạng xung chốt.
Các chân dữ liệu D7÷D0: Chân số 7 đến chân số 14 là 8 chân dùng để trao đổi dữ liệu giữa thiết bị điều khiển và LCD.
d. Địa chỉ ba vùng nhớ
Bộ điều khiển LCD có ba vùng nhớ nội, mỗi vùng có chức năng riêng. Bộ điều khiển phải khởi động trước khi truy cập bất kỳ vùng nhớ nào. a. Bộ nhớ DDRAM
Bộ nhớ chứa dữ liệu để hiển thị (Display Data RAM: DDRAM) lưu trữ những mã ký tự để hiển thị lên màn hình. Mã ký tự lưu trữ trong vùng DDRAM sẽ tham chiếu với từng bitmap kí tự được lưu trữ trong CGROM đã được định nghĩa trước hoặc đặt trong vùng do người sử dụng định nghĩa. b. Bộ phát kí tự ROM – CGROM
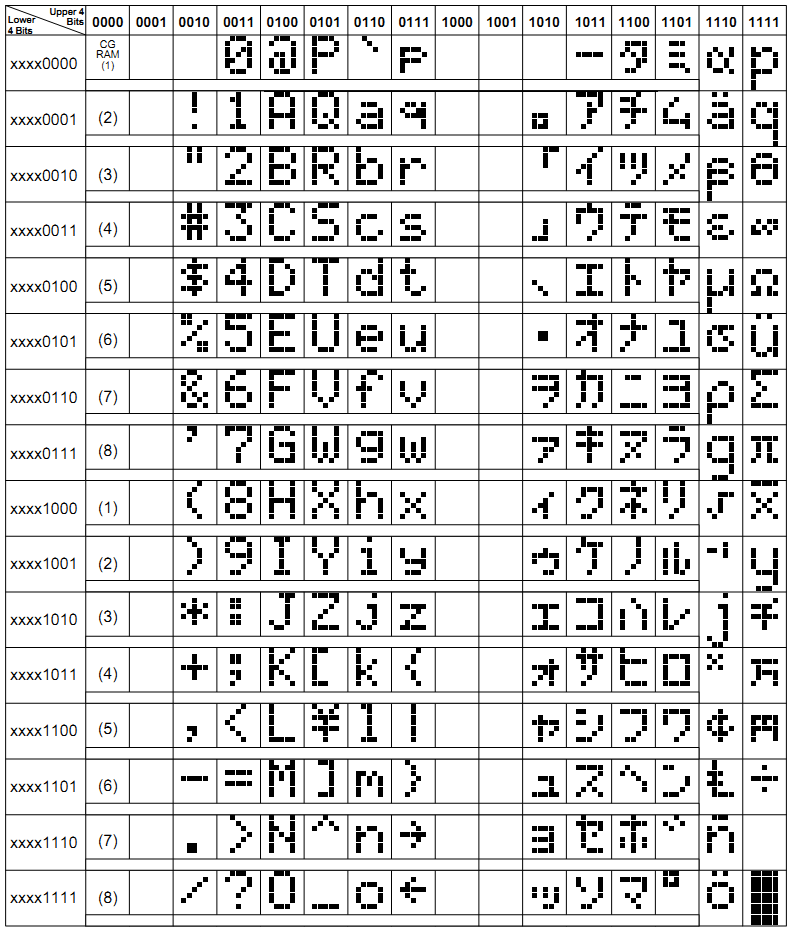
Bộ phát kí tự ROM (Character Generator ROM: CGROM) chứa các kiểu bitmap cho mỗi kí tự được định nghĩa trước mà LCD có thể hiển thị, như được trình bày bảng mã ASCII. Mã kí tự lưu trong DDRAM cho mỗi vùng kí tự sẽ được tham chiếu đến một vị trí trong CGROM. Ví dụ: mã kí tự số hex 0x53 lưu trong DDRAM được chuyển sang dạng nhị phân 4 bit cao là DB[7:4] = “0101” và 4 bit thấp là DB[3:0] = “0011” chính là kí tự chữ ‘S’ sẽ hiển thị trên màn hình LCD. c. Bộ phát kí tự RAM – CGRAM
Bộ phát kí tự RAM (Character Generator RAM: CG RAM) cung cấp vùng nhớ để tạo ra 8 kí tự tùy ý. Mỗi kí tự gồm 5 cột và 8 hàng.
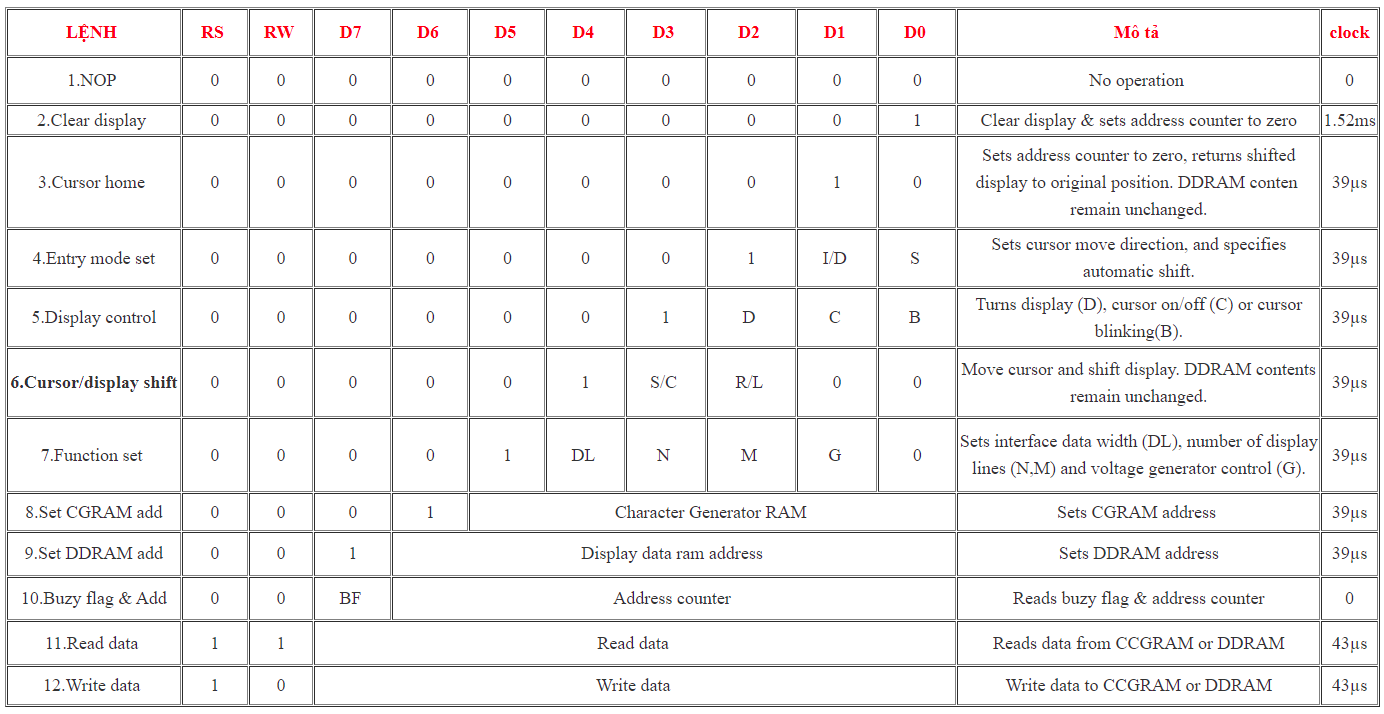
e. Các lệnh điều khiển của LCD
Lệnh thiết lập chức năng giao tiếp “Function set”:
Bit DL (data length) = 1 thì cho phép giao tiếp 8 đường data D7 ÷ D0, nếu bằng 0 thì cho phép giao tiếp 4 đường D7 ÷ D4.
Bit N (number of line) = 1 thì cho phép hiển thị 2 hàng, nếu bằng 0 thì cho phép hiển thị 1 hàng.
Bit F (font) = 1 thì cho phép hiển thị với ma trận 5×8, nếu bằng 0 thì cho phép hiển thị với ma trận 5×11.
Các bit cao còn lại là hằng số không đổi.
Lệnh xoá màn hình “Clear Display”: khi thực hiện lệnh này thì LCD sẽ bị xoá và bộ đếm địa chỉ được xoá về 0.
Lệnh di chuyển con trỏ về đầu màn hình “Cursor Home”: khi thực hiện lệnh này thì bộ đếm địa chỉ được xoá về 0, phần hiển thị trở về vị trí gốc đã bị dịch trước đó. Nội dung bộ nhớ RAM hiển thị DDRAM không bị thay đổi.
Lệnh thiết lập lối vào “Entry mode set”: lệnh này dùng để thiết lập lối vào cho các kí tự hiển thị,
Bit I/D = 1 thì con trỏ tự động tăng lên 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị, khi I/D = 0 thì con trỏ sẽ tự động giảm đi 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị.
Bit S = 1 thì cho phép dịch chuyển dữ liệu mỗi khi nhận 1 byte hiển thị.
Lệnh điều khiển con trỏ hiển thị “Display Control”:
Bit D: cho phép LCD hiển thị thì D = 1, không cho hiển thị thì bit D = 0.
Bit C: cho phép con trỏ hiển thị thì C= 1, không cho hiển thị con trỏ thì bit C = 0.
Bit B: cho phép con trỏ nhấp nháy thì B= 1, không cho con trỏ nhấp nháy thì bit B = 0.
Với các bit như trên thì để hiển thị phải cho D = 1, 2 bit còn lại thì tùy chọn, trong thư viện thì cho 2 bit đều bằng 0, không cho phép mở con trỏ và nhấp nháy, nếu bạn không thích thì hiệu chỉnh lại.
Lệnh di chuyển con trỏ “Cursor /Display Shift”: lệnh này dùng để điều khiển di chuyển con trỏ hiển thị dịch chuyển
Bit SC: SC = 1 cho phép dịch chuyển, SC = 0 thì không cho phép.
Bit RL xác định hướng dịch chuyển: RL = 1 thì dịch phải, RL = 0 thì dịch trái. Nội dung bộ nhớ DDRAM vẫn không đổi.
Vậy khi cho phép dịch thì có 2 tùy chọn: dịch trái và dịch phải.
Lệnh thiết lập địa chỉ cho bộ nhớ RAM phát kí tự “Set CGRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM phát kí tự.
Lệnh thiết lập địa chỉ cho bộ nhớ RAM hiển thị “Set DDRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM lưu trữ các dữ liệu hiển thị.
Hai lệnh cuối cùng là lệnh đọc và lệnh ghi dữ liệu LCD.
f. Bảng mã ASCII sử dụng cho LCD
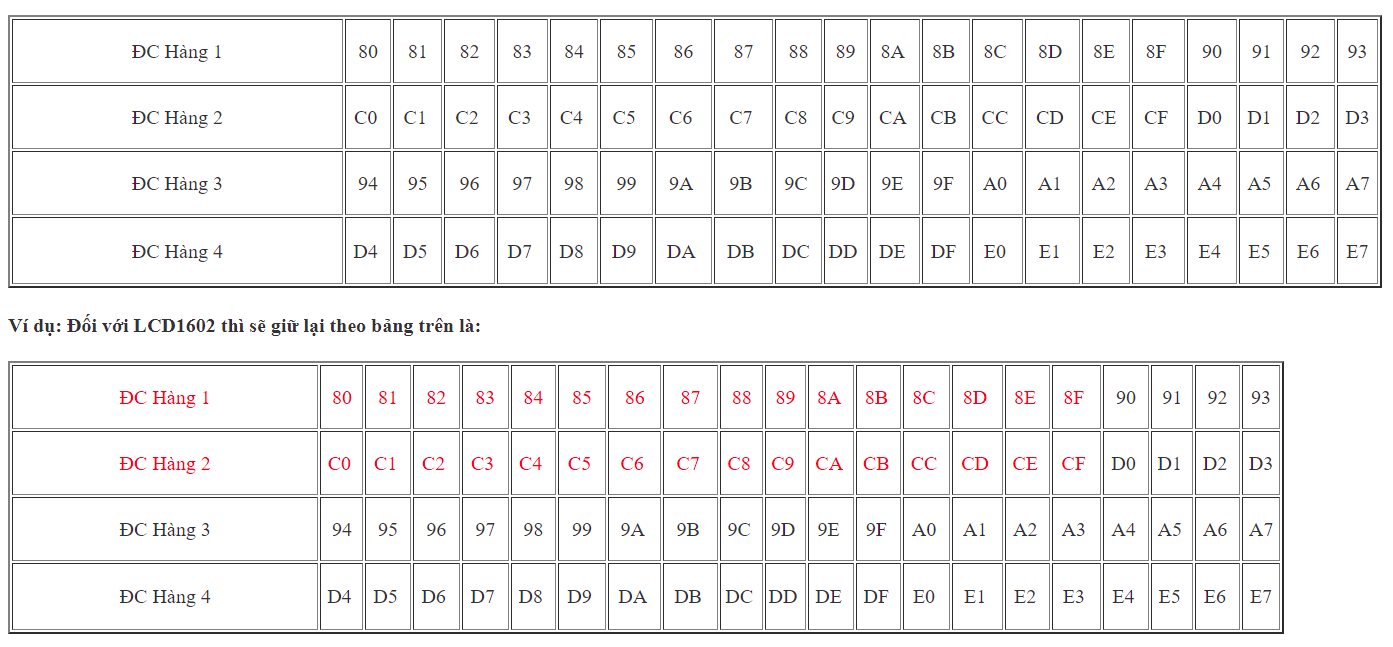
g. Bảng địa chỉ cho LCD
2. Hướng dẫn đồ án cảm biến gia tốc L3G4200 giao tiếp Pic16F hiển thị LCD1602
Phần này chưa được chia sẻ.
LIÊN HỆ thông tin ở TẠI ĐÂY để được hổ trợ tốt hơn.
Phần cứng
Phần mềm
//This code is to use with L3G4200 triple axis gyro//Modified by SurtrTech//Refer to https://surtrtech.com/ for more information#include <Wire.h>#define CTRL_REG1 0x20#define CTRL_REG2 0x21#define CTRL_REG3 0x22#define CTRL_REG4 0x23#define CTRL_REG5 0x24int L3G4200D_Address = 105; //I2C address of the L3G4200Dint x;int y;int z;void setup(){Wire.begin(); Serial.begin(9600);Serial.println("starting up L3G4200D"); setupL3G4200D(2000); // Configure L3G4200 - 250, 500 or 2000 deg/secdelay(1500); //wait for the sensor to be ready }void loop(){ getGyroValues(); // This will update x, y, and z with new valuesSerial.print("X:"); Serial.print(x); //Here you can do some operations befor you use that value //For example set it on a surface and substract or add numbers to get 0,0,0 if you want that position to be your reference Serial.print(" Y:"); Serial.print(y);Serial.print(" Z:"); Serial.println(z);delay(100); //Just here to slow down the serial to make it more readable}void getGyroValues(){byte xMSB = readRegister(L3G4200D_Address, 0x29); byte xLSB = readRegister(L3G4200D_Address, 0x28); x = ((xMSB << 8) | xLSB);byte yMSB = readRegister(L3G4200D_Address, 0x2B); byte yLSB = readRegister(L3G4200D_Address, 0x2A); y = ((yMSB << 8) | yLSB);byte zMSB = readRegister(L3G4200D_Address, 0x2D); byte zLSB = readRegister(L3G4200D_Address, 0x2C); z = ((zMSB << 8) | zLSB);}int setupL3G4200D(int scale){ //From Jim Lindblom of Sparkfun's code// Enable x, y, z and turn off power down: writeRegister(L3G4200D_Address, CTRL_REG1, 0b00001111);// If you'd like to adjust/use the HPF, you can edit the line below to configure CTRL_REG2: writeRegister(L3G4200D_Address, CTRL_REG2, 0b00000000);// Configure CTRL_REG3 to generate data ready interrupt on INT2 // No interrupts used on INT1, if you'd like to configure INT1 // or INT2 otherwise, consult the datasheet: writeRegister(L3G4200D_Address, CTRL_REG3, 0b00001000);// CTRL_REG4 controls the full-scale range, among other things:if(scale == 250){ writeRegister(L3G4200D_Address, CTRL_REG4, 0b00000000); }else if(scale == 500){ writeRegister(L3G4200D_Address, CTRL_REG4, 0b00010000); }else{ writeRegister(L3G4200D_Address, CTRL_REG4, 0b00110000); }// CTRL_REG5 controls high-pass filtering of outputs, use it // if you'd like: writeRegister(L3G4200D_Address, CTRL_REG5, 0b00000000);}void writeRegister(int deviceAddress, byte address, byte val) { Wire.beginTransmission(deviceAddress); // start transmission to device Wire.write(address); // send register address Wire.write(val); // send value to write Wire.endTransmission(); // end transmission}int readRegister(int deviceAddress, byte address){int v; Wire.beginTransmission(deviceAddress); Wire.write(address); // register to read Wire.endTransmission();Wire.requestFrom(deviceAddress, 1); // read a bytewhile(!Wire.available()) { // waiting }v = Wire.read(); return v;}
3. Hoạt động của mạch cảm biến gia tốc L3G4200 giao tiếp Pic16F
Khi cấp điện hệ thống hoạt động, vi điều khiển đưa tín hiệu ban đầu cho lcd1602 hiển thị thông tin người dùng, lúc này vi điều khiển chờ tín hiệu được gửi vào từ cảm biến gia tốc L3G4200 giao tiếp Pic16F gửi vào. Khi nhận được tín hiệu vi điều khiển xử lý và gửi giá trị tọa độ trục X, Y, Z ra ngoài màn hình LCD1602 để hiển thị giá trị theo yêu cầu đã được lập trình.
4. Cụ thể hoạt động của mạch cảm biến gia tốc L3G4200 giao tiếp Pic16F

 Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của
máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …
Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của
máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, … 
 Các khối bên trong vi điều khiển bao gồm:
Các khối bên trong vi điều khiển bao gồm: