Table of Contents
1. Linh kiện cần thiết làm mạch điều khiển motor giảm tốc dc bằng module L298
1.1 Vi điều khiển Pic16F877A trong mạch điều khiển motor giảm tốc dc bằng module L298
a. Giới thiệu
- PIC là một họ vi điều khiển RISC được sản xuất bởi công ty Microchip Technology.
- Dòng PIC đầu tiên là PIC1650 sau đó phát triển lên nhiều dòng khác nhau như:
- Pic10F
- Pic12F
- Pic16F
- Pic18F
- Pic24F
- Pic32F
 Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của
máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …
Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit.
Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của
máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt.
Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, … 
b. Đặc điểm thực thi tốc độ cao CPU RISC là:
- Có 35 lệnh đơn.
- Thời gian thực hiện tất cả các lệnh là 1 chu kì máy, ngoại trừ lệnh rẽ nhánh là 2.
- Tốc độ hoạt động: + Ngõ vào xung clock có tần số 20MHz. + Chu kì lệnh thực hiện lệnh 200ns.
- Có nhiều nguồn ngắt.
- Có 3 kiểu định địa chỉ trực tiếp, gián tiếp và tức thời.
c. Cấu trúc đặc biệt của vi điều khiển
- Bộ dao động nội chính xác + Sai số ± 1% + Có thể lựa chọn tần số từ 31 kHz đến 8 Mhz bằng phần mềm. + Cộng hưởng bằng phần mềm. + Chế độ bắt đầu 2 cấp tốc độ. + Mạch phát hiện hỏng dao động thạch anh cho các ứng dụng quan trọng. + Có chuyển mạch nguồn xung clock trong quá trình hoạt động để tiết kiệm công suất.
- Có chế độ ngủ để tiết kiệm công suất.
- Dãy điện áp hoạt động rộng từ 2V đến 5,5V.
- Tầm nhiệt độ làm việc theo chuẩn công nghiệp.
- Có mạch reset khi có điện (Power On Reset – POR).
- Có bộ định thời chờ ổn định điện áp khi mới có điện (Power up Timer – PWRT) và bộ định thời chờ dao động hoạt động ổn định khi mới cấp điện (Oscillator Startup Timer – OST).
- Có mạch tự động reset khi phát hiện nguồn điện cấp bị sụt giảm, cho phép lựa chọn bằng phần mềm (Brown out Reset – BOR).
- Có bộ định thời giám sát (Watchdog Timer – WDT) dùng dao động trong chip cho phép bằng phần mềm (có thể định thời lên đến 268 giây).
- Đa hợp ngõ vào reset với ngõ vào có điện trở kéo lên.
- Có bảo vệ code đã lập trình.
- Bộ nhớ Flash cho phép xóa và lập trình 100,000 lần.
- Bộ nhớ Eeprom cho phép xóa và lập trình 1,000,000 lần và có thể tồn tại trên 40 năm.
- Cho phép đọc/ghi bộ nhớ chương trình khi mạch hoạt động.
- Có tích hợp mạch gỡ rối.
d. Cấu trúc nguồn công suất thấp
- Chế độ chờ: dòng tiêu tán khoảng 50nA, sử dụng nguồn 2V.
- Dòng hoạt động. + 11µA ở tần số hoạt động 32kHz, sử dụng nguồn 2V. + 220µA ở tần số hoạt động 4MHz, sử dụng nguồn 2V.
- Bộ định thời Watchdog Timer khi hoạt động tiêu thụ 1,4µA, điện áp 2V.
e. Cấu trúc ngoại vi
- Có 35 chân I/O cho phép lựa chọn hướng độc lập: + Mỗi ngõ ra có thể nhận/cấp dòng lớn khoảng 25mA nên có thể trực tiếp điều khiển led + Có các port báo ngắt khi có thay đổi mức logic. + Có các port có điện trở kéo lên bên trong có thể lập trình. + Có ngõ vào báo thức khỏi chế độ công suất cực thấp.
- Có module so sánh tương tự: + Có 2 bộ so sánh điện áp tương tự + Có module nguồn điện áp tham chiếu có thể lập trình. + Có nguồn điện áp tham chiếu cố định có giá trị bằng 0,6V. + Có các ngõ vào và các ngõ ra của bộ so sánh điện áp. + Có chế độ chốt SR.
Có bộ chuyển đổi tương tự sang số: Có 14 bộ chuyển đổi tương tự với độ phân giải 10 bit.
- Có timer0: 8 bit hoạt động định thời/đếm xung ngoại có bộ chia trước có thể lập trình.
- Có timer1: + 16 bit hoạt động định thời/đếm xung ngoại có bộ chia trước có thể lập trình. + Có ngõ vào cổng của timer1 để có thể điều khiển timer1 đếm từ tín hiệu bên ngoài. + Có bộ dao động công suất thấp có tần số 32kHz.
- Có timer2: 8 bit hoạt động định thời với thanh ghi chu kỳ, có bộ chia trước và chia sau.
- Có module capture, compare và điều chế xung PWM+ nâng cao + Có bộ capture 16 bit có thể đếm được xung với độ phân giải cao nhất là 12,5ns. + Có bộ điều chế xung PWM với số kênh ngõ ra là 1, 2 hoặc 4, có thể lập trình với tần số lớn nhất là 20kHz. + Có ngõ ra PWM điều khiển lái.
- Có module capture, compare và điều chế xung PWM + Có bộ capture 16 bit có thể đếm được xung với chu kỳ cao nhất là 12,5ns. + Có bộ so sánh 16 bit có thể so sánh xung đếm với chu kỳ lớn nhất là 200ns + Có bộ điều chế xung PWM có thể lập trình với tần số lớn nhất là 20kHz.
- Có thể lập trình trên bo ISP thông qua 2 chân.
- Có module truyền dữ liệu nối tiếp đồng bộ MSSP hổ trợ chuẩn truyền 3 dây SPI, chuẩn I2C ở 2 chế độ chủ và tớ.
f. Cấu trúc của vi điều khiển
 Các khối bên trong vi điều khiển bao gồm:
Các khối bên trong vi điều khiển bao gồm:- Có khối thanh ghi định cấu hình cho vi điều khiển.
- Có khối bộ nhớ chương trình có nhiều dung lượng cho 5 loại khác nhau.
- Có khối bộ nhớ ngăn xếp 8 cấp (8 level stack).
- Có khối bộ nhớ Ram cùng với thanh ghi FSR để tính toán tạo địa chỉ cho 2 cách truy xuất gián tiếp và trực tiếp.
- Có thanh ghi lệnh (Instruction register) dùng để lưu mã lệnh nhận về từ bộ nhớ chương trình.
g. Cấu hình bên trong của vi điều khiển
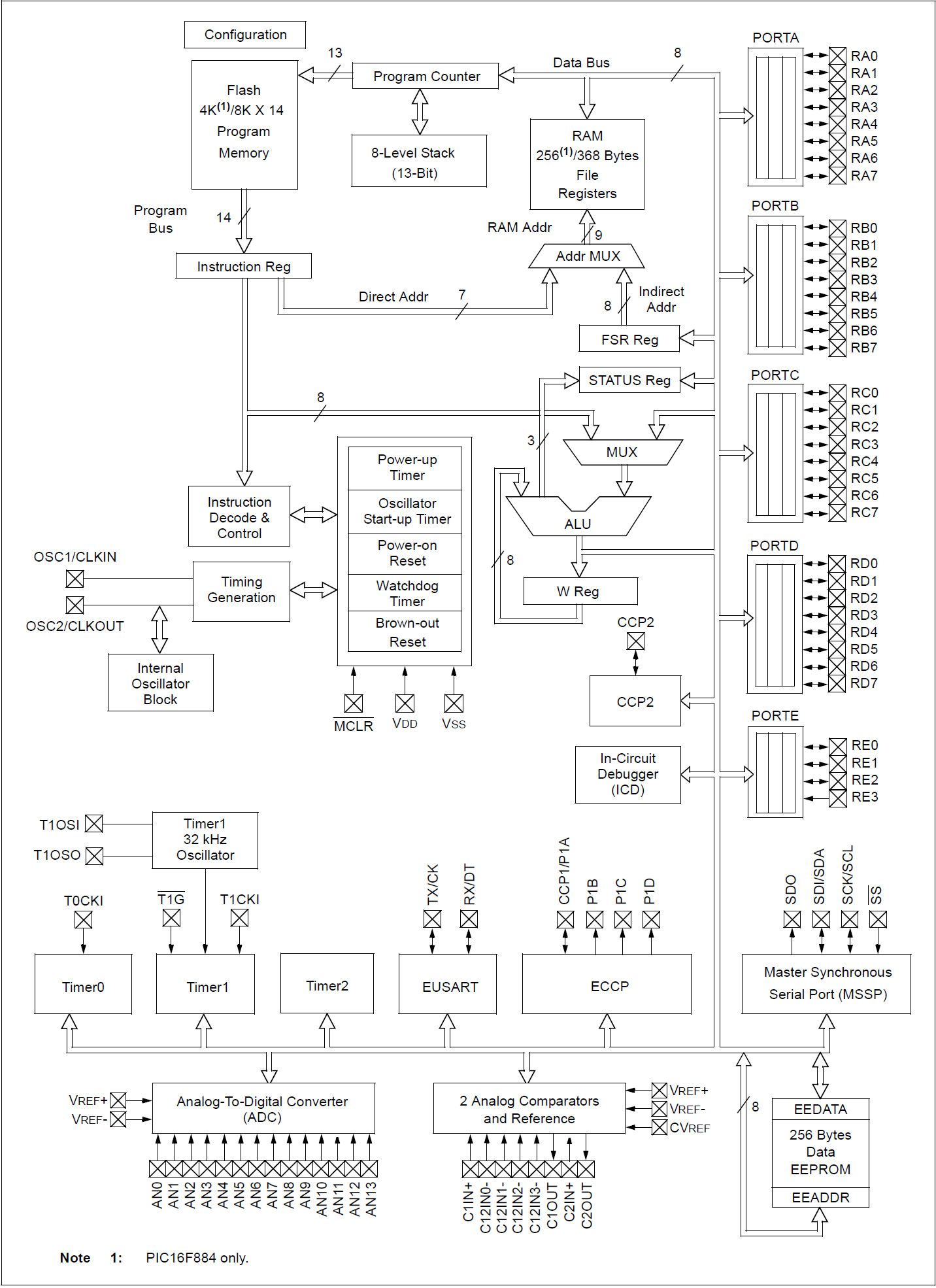
- Có thanh ghi trạng thái (status register) cho biết trạng thái sau khi tính toán của khối ALU.
- Có thanh ghi FSR.
- Có khối ALU cùng với thanh ghi working hay thanh ghi A để xử lý dữ liệu.
- Có khối giải mã lệnh và điều khiển (Instruction Decode and Control).
- Có khối dao động nội (Internal Oscillator Block).
- Có khối dao động kết nối với 2 ngõ vào OSC1 và OSC2 để tạo dao động.
- Có khối các bộ định thời khi cấp điện PUT, có bộ định thời chờ dao động ổn định, có mạch reset khi có điện, có bộ định thời giám sát watchdog, có mạch reset khi phát hiện sụt giảm nguồn.
- Có khối bộ dao động cho timer1 có tần số 32kHz kết nối với 2 ngõ vào T1OSI và T1OSO.
- Có khối CCP2 và ECCP.
- Có khối mạch gỡ rối (In-Circuit Debugger IDC).
- Có khối timer0 với ngõ vào xung đếm từ bên ngoài là T0CKI.
- Có khối truyền dữ liệu đồng bộ/bất đồng bộ nâng cao.
- Có khối truyền dữ liệu đồng bộ MSSP cho SPI và I2C.
- Có khối bộ nhớ Eeprom 256 byte và thanh ghi quản lý địa chỉ EEADDR và thanh ghi dữ liệu EEDATA.
- Có khối chuyển đổi tín hiệu tương tự sang số ADC.
- Có khối 2 bộ so sánh với nhiều ngõ vào ra và điện áp tham chiếu.
- Có khối các port A, B, C, E và D
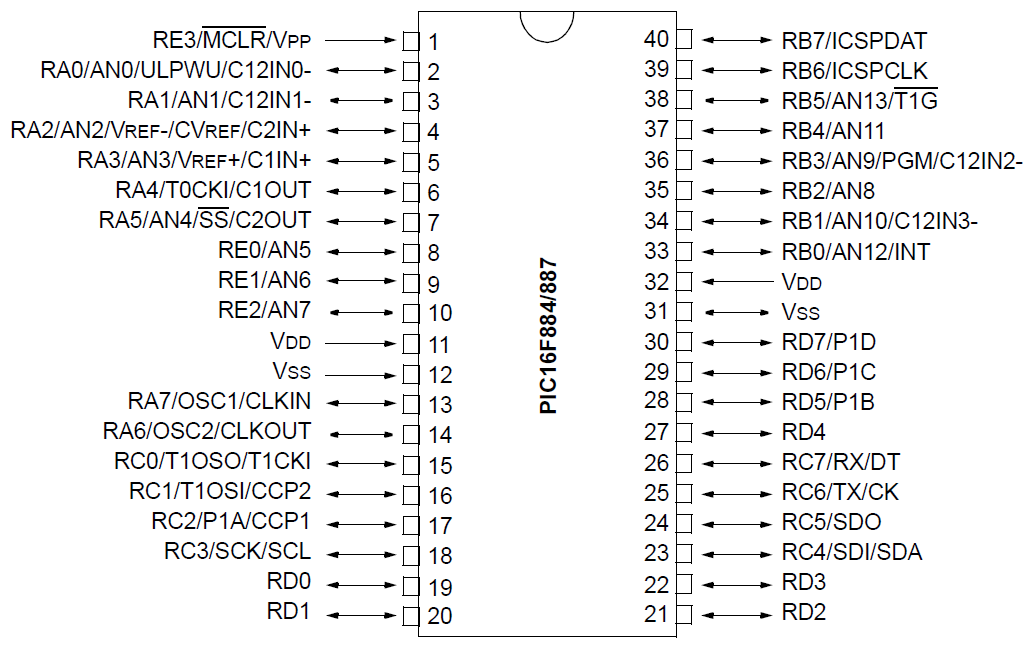
a. Chức năng các chân của portA
- Chân RA0/AN0/ULPWU/C12IN0- (2): có 4 chức năng: + RA0: xuất/ nhập số – bit thứ 0 của port A. + AN0: ngõ vào tương tự của kênh thứ 0.
- Chân RA1/AN1/C12IN1- (3): có 3 chức năng: + RA1: xuất/nhập số – bit thứ 1 của port A. + AN1: ngõ vào tương tự của kênh thứ 1
- Chân RA2/AN2/VREF-/CVREF/C2IN+ (4): có 5 chức năng: + RA2: xuất/nhập số – bit thứ 2 của port A. + AN2: ngõ vào tương tự của kênh thứ 2. + VREF-: ngõ vào điện áp chuẩn (thấp) của bộ ADC. + CVREF: điện áp tham chiếu VREF ngõ vào bộ so sánh.
- Chân RA3/AN3/VREF+/C1IN+ (5): có 4 chức năng: + RA3: xuất/nhập số – bit thứ 3 của port A. + AN3: ngõ vào tương tự kênh thứ 3. + VREF+: ngõ vào điện áp chuẩn (cao) của bộ A/D. + C1IN+: ngõ vào dương của bộ so sánh C1. + Chân RA4/TOCKI/C1OUT (6): có 3 chức năng:
- RA4: xuất/nhập số – bit thứ 4 của port A. + TOCKI: ngõ vào xung clock từ bên ngoài cho Timer0. + C1OUT: ngõ ra bộ so sánh 1. + Chân RA5/AN4/ SS / C2OUT (7): có 4 chức năng: + RA5: xuất/nhập số – bit thứ 5 của port A. + AN4: ngõ vào tương tự kênh thứ 4. + SS : ngõ vào chọn lựa SPI tớ (Slave SPI device). + C2OUT: ngõ ra bộ so sánh 2.
- Chân RA6/OSC2/CLKOUT (14): có 3 chức năng: + RA6: xuất/nhập số – bit thứ 6 của port A. + OSC2: ngõ ra dao động thạch anh. Kết nối đến thạch anh hoặc bộ cộng hưởng.
- Chân RA7/OSC1/CLKIN (13): có 3 chức năng. + RA7: xuất/nhập số – bit thứ 7 của port A. + OSC1: ngõ vào dao động thạch anh hoặc ngõ vào nguồn xung ở bên ngoài.
b. Chức năng các chân của portB
- Chân RB0/AN12/INT (33): có 3 chức năng: + RB0: xuất/nhập số – bit thứ 0 của port B. + AN12: ngõ vào tương tự kênh thứ 12. + INT: ngõ vào nhận tín hiệu ngắt ngoài. + Chân RB1/AN10/C12IN3- (34): có 3 chức năng:
- RB1: xuất/nhập số – bit thứ 1 của port B. + AN10: ngõ vào tương tự kênh thứ 10. + C12IN3-: ngõ vào âm thứ 3 của bộ so sánh C1 hoặc C2. + Chân RB2/AN8 (35): có 2 chức năng:
- RB2: xuất/nhập số – bit thứ 2 của port B. + AN8: ngõ vào tương tự kênh thứ 8. + Chân RB3/AN9/PGM/C12IN2 (36): có 4 chức năng:
- RB3: xuất/nhập số – bit thứ 3 của port B. + AN9: ngõ vào tương tự kênh thứ 9. + PGM: Chân cho phép lập trình điện áp thấp ICSP. + C12IN1-: ngõ vào âm thứ 2 của bộ so sánh C1 hoặc C2 + Chân RB4/AN11 (37): có 2 chức năng:
- RB4: xuất/nhập số – bit thứ 4 của port B. + AN11: ngõ vào tương tự kênh thứ 11. + Chân RB5/ AN13/T1G (38): có 3 chức năng:
- RB5: xuất/nhập số – bit thứ 5 của port B. + AN13: ngõ vào tương tự kênh thứ 13. + T1G (Timer1 gate input): ngõ vào Gate cho phép time1 đếm dùng để đếm độ rộng xung. + Chân RB6/ICSPCLK (39): có 2 chức năng:
- RB6: xuất/nhập số. + ICSPCLK: xung clock lập trình nối tiếp. + Chân RB7/ICSPDAT (40): có 2 chức năng:
- RB7: xuất/nhập số. + ICSPDAT: ngõ xuất nhập dữ liệu lập trình nối tiếp.
c. Chức năng các chân của portC
- Chân RC0/T1OSO/T1CKI (15): có 3 chức năng: + RC0: xuất/nhập số – bit thứ 0 của port C. + T1OSO: ngõ ra của bộ dao động Timer1. + T1CKI: ngõ vào xung clock từ bên ngoài Timer1.
- Chân RC1/T1OSI/CCP2 (16): có 3 chức năng: + RC1: xuất/nhập số – bit thứ 1 của port C. + T1OSI: ngõ vào của bộ dao động Timer1. + CCP2: ngõ vào Capture2, ngõ ra compare2, ngõ ra PWM2.
- Chân RC2 /P1A/CCP1 (17): có 3 chức năng: + RC2: xuất/nhập số – bit thứ 2 của port C. + P1A: ngõ ra PWM. + CCP1: ngõ vào Capture1, ngõ ra compare1, ngõ ra PWM1.
- Chân RC3/SCK/SCL (18): có 3 chức năng: + RC3: xuất/nhập số – bit thứ 3 của port C. + SCK: ngõ vào xung clock nối tiếp đồng bộ/ngõ ra của chế độ SPI. + SCL: ngõ vào xung clock nối tiếp đồng bộ/ngõ ra của chế độ I2C.
- Chân RC4/SDI/SDA (23): có 3 chức năng: + RC4: xuất/nhập số – bit thứ 4 của port C. + SDI: ngõ vào dữ liệu trong truyền dữ liệu kiểu SPI. + SDA: xuất/nhập dữ liệu I2C.
- Chân RC5/SDO (24): có 2 chức năng: + RC5: xuất/nhập số – bit thứ 5 của port C. + SDO: ngõ xuất dữ liệu trong truyền dữ liệu kiểu SPI.
- Chân RC6/TX/CK (25): có 3 chức năng: + RC6: xuất/nhập số – bit thứ 6 của port C. + TX: ngõ ra phát dữ liệu trong chế độ truyền bất đồng bộ USART. + CK: ngõ ra cấp xung clock trong chế độ truyền đồng bộ USART.
- Chân RC7/RX/DT (26): có 3 chức năng: + RC7: xuất/nhập số – bit thứ 7 của port C. + RX: ngõ vào nhận dữ liệu trong chế độ truyền bất đồng bộ EUSART. + DT: ngõ phát và nhận dữ liệu ở chế độ truyền đồng bộ EUSART.
d. Chức năng các chân của portD
- Chân RD0 (19): có 1 chức năng: + RD0: xuất/nhập số – bit thứ 0 của port D.
- Chân RD1 (20): có 1 chức năng: + RD1: xuất/nhập số – bit thứ 1 của port D.
- Chân RD2 (21): có 1 chức năng: + RD2: xuất/nhập số – bit thứ 2 của port D.
- Chân RD3 (22): có 1 chức năng: + RD3: xuất/nhập số – bit thứ 3 của port D.
- Chân RD4 (27): có 1 chức năng: + RD4: xuất/nhập số – bit thứ 4 của port D.
- Chân RD5/ P1B (28): có 2 chức năng: + RD5: xuất/nhập số – bit thứ 5 của port D. + P1B: ngõ ra PWM.
- Chân RD6/ P1C (29): có 2 chức năng: + RD6: xuất/nhập số – bit thứ 6 của port D. + P1C: ngõ ra PWM.
- Chân RD7/P1D (30): có 2 chức năng: + RD7: xuất/nhập số – bit thứ 7 của port D. + P1D: ngõ ra tăng cường CPP1
e. Chức năng các chân của portE
- Chân RE0/AN5 (8): có 2 chức năng: + RE0: xuất/nhập số. + AN5: ngõ vào tương tự 5.
- Chân RE1/AN6 (9): có 2 chức năng: + RE1: xuất/nhập số. + AN6: ngõ vào tương tự kênh thứ 6.
- Chân RE2/AN7 (10): có 2 chức năng: + RE2: xuất/nhập số. + AN7: ngõ vào tương tự kênh thứ 7.
- Chân RE3/ MCLR /VPP (1): có 3 chức năng: + RE3: xuất/nhập số – bit thứ 3 của port E. + MCLR : là ngõ vào reset tích cực mức thấp. + VPP: ngõ vào nhận điện áp khi ghi dữ liệu vào bộ nhớ nội flash. + Chân VDD (11), (32): + Nguồn cung cấp dương từ 2V đến 5V. + Chân VSS (12), (31): + Nguồn cung cấp 0V.
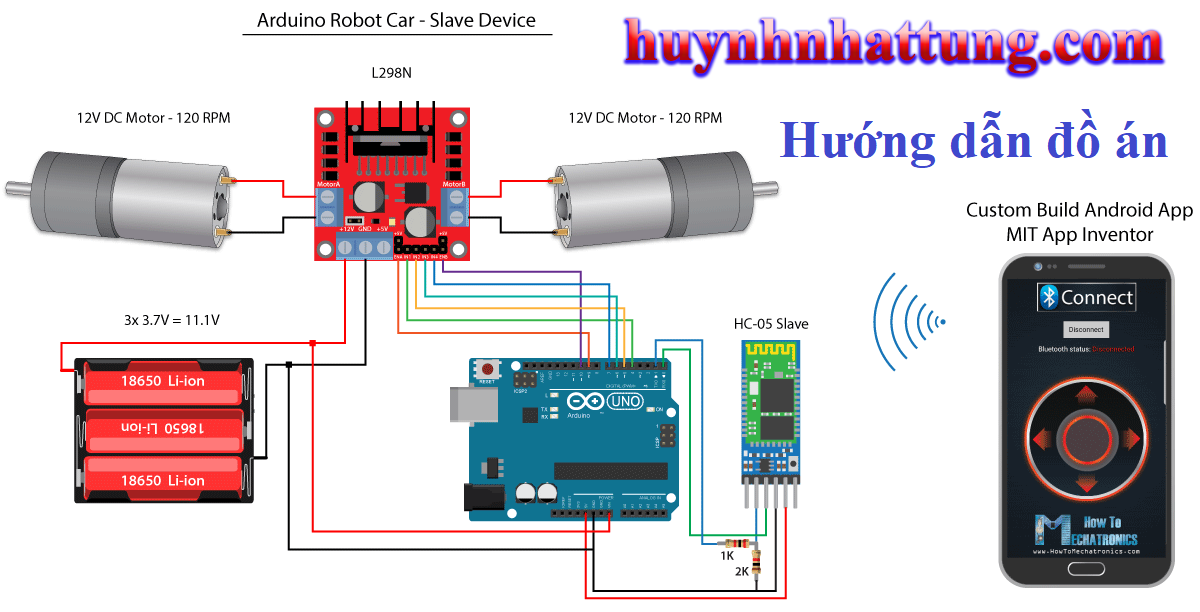
1.2 Module l298 điều khiển motor giảm tốc dc
a. Giới thiệu motor giảm tốc
Module điều khiển động cơ L298 ( mạch cầu H L298) là một module hưu ích, phổ biến với chức năng thông dụng và giá thành cực kỳ rẻ là lựa chọn của các bạn học sinh, sinh viên. Mạch này có thể điều khiển được 2 động cơ. Ứng dụng rất nhiều vào các đề tài: điều khiển xe robot, điều khiển cánh tay robot (Cánh tay robot 3 bậc bạn phải sử dụng tới 2 mô đun này), Arduino để điều khiển động cơ sử dụng mô đun điều khiển động cơ… Module l298 điều khiển được các động cơ như motor giảm tốc, motor mini, động cơ bước, động cơ servo, động cơ dc
b. Thông số kỹ thuật motor giảm tốc
- Driver: L298N tích hợp hai mạch cầu H.
- Điện áp điều khiển: +5 V ~ +35 V
- Dòng tối đa cho mỗi cầu H là: 2A
- Điện áp của tín hiệu điều khiển: +5 V ~ +7 V
- Dòng của tín hiệu điều khiển: 0 ~ 36mA
- Công suất hao phí: 20W (khi nhiệt độ T = 75 ℃)
- Nhiệt độ bảo quản: -25 ℃ ~ +130 ℃
c. Sơ đồ chân module L298
- 12V power, 5V power: là 2 chân cấp nguồn trực tiếp đến động cơ .
- Power GND : là chân GND cấp nguồn cho động cơ
- 2 Jump A enable và B enable dùng cho phép động cơ chạy hoặc dừng
- IN1, IN2, IN3, IN4: Là 4 chân input , chức năng nhận tín hiệu từ vi điều khiển hoặc Arduino để điều khiển động cơ
- Output A: nối với động cơ A. bạn chú ý chân +, -. Nếu bạn nối ngược thì động cơ sẽ chạy ngược. Và chú ý nếu bạn nối động cơ bước, bạn phải đấu nối các pha cho phù hợp
1.3 Motor giảm tốc V1
a. Giới thiệu motor giảm tốc
- Động cơ DC giảm tốc V1 là loại được lựa chọn và sử dụng nhiều nhất hiện nay cho các thiết kế Robot đơn giản, động cơ DC giảm tốc V1 có chất lượng và giá thành vừa phải cùng với khả năng dễ lắp ráp của nó đem đến chi phí tiết kiệm và sự tiện dụng cho người sử dụng, các bạn khi mua động cơ giàm tốc V1 có thể mua thêm gá bắt động cơ vào thân Robot cũng như bánh xe tương thích.
- Động cơ DC giảm tốc V1 1:48 hộp số kim loại có trục quay và bánh răng của hộp số được làm bằng kim loại cho tuổi thọ và độ bền cao hơn các loại bằng nhựa (các loại bằng nhựa khi chạy 1 thời gian sẽ bị tình trạng các bánh răng nhựa bị rơ, kẹt khiến cho vận tốc động cơ thay đổi theo thời gian), thích hợp để lắp ráp các mô hình Robot, Cơ khí đơn giản.

b. Thông số kỹ thuật motor giảm tốc
- Điện áp hoạt động: 3V~ 9V DC (Hoạt động tốt nhất từ 6 – 8V)
- Dòng không tải: 70mA (250mA MAX)
- Mômen xoắn cực đại: 800gf cm min 1:48 (3V)
- Tốc độ không tải: 125 Vòng/ 1 Phút (3V) (Với bánh 66mm: 26m/1p) 208 Vòng/ 1 Phút (5V) (Với bánh 66mm: 44m/1p)
1.4 LCD1602 cho mạch điều khiển motor giảm tốc dc bằng module l298
a. Giới thiệu
b. Thông số kỹ thuật
- Điện áp hoạt động là 5 V.
- Kích thước: 80 x 36 x 12.5 mm
- Chữ đen, nền xanh lá
- Khoảng cách giữa hai chân kết nối là 0.1 inch tiện dụng khi kết nối với Breadboard.
- Tên các chân được ghi ở mặt sau của màn hình LCD hổ trợ việc kết nối, đi dây điện.
- Có đèn led nền, có thể dùng biến trở hoặc PWM điều chình độ sáng để sử dụng ít điện năng hơn.
- Có thể được điều khiển với 6 dây tín hiệu
- Có bộ ký tự được xây dựng hổ trợ tiếng Anh và tiếng Nhật, xem thêm HD44780 datasheet để biết thêm chi tiết.
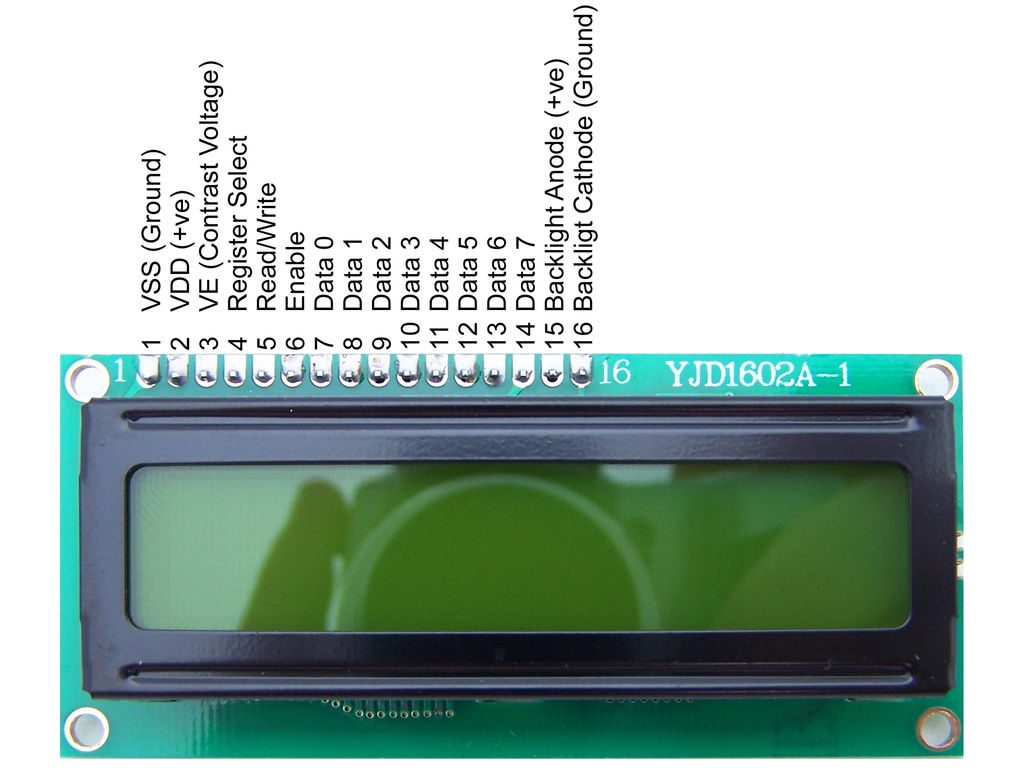
c. Sơ đồ chân LCD 16×2
| Số chân | Ký hiệu chân | Mô tả chân |
| 1 | Vss | Cấp điện 0v |
| 2 | Vcc | Cấp điện 5v |
| 3 | V0 | Chỉnh độ tương phản |
| 4 | RS | Lựa chọn thanh ghi địa chỉ hay dữ liệu |
| 5 | RW | Lựa chọn thanh ghi Đọc hay Viết |
| 6 | EN | Cho phép xuất dữ liệu |
| 7 | D0 | Đường truyền dữ liệu 0 |
| 8 | D1 | Đường truyền dữ liệu 1 |
| 9 | D2 | Đường truyền dữ liệu 2 |
| 10 | D3 | Đường truyền dữ liệu 3 |
| 11 | D4 | Đường truyền dữ liệu 4 |
| 12 | D5 | Đường truyền dữ liệu 5 |
| 13 | D6 | Đường truyền dữ liệu 6 |
| 14 | D7 | Đường truyền dữ liệu 7 |
| 15 | A | Chân dương đèn màn hình |
| 16 | K | Chân âm đèn màn hình |
- Các chân cấp nguồn: Chân số 1 là chân nối mass (0V), chân thứ 2 là Vdd nối với nguồn+5V. Chân thứ 3 dùng để chỉnh contrast thường nối với biến trở.
- Các chân điều khiển: Chân số 4 là chân RS dùng để điều khiển lựa chọn thanh ghi. ChânR/W dùng để điều khiển quá trình đọc và ghi. Chân E là chân cho phép dạng xung chốt.
- Các chân dữ liệu D7÷D0: Chân số 7 đến chân số 14 là 8 chân dùng để trao đổi dữ liệu giữa thiết bị điều khiển và LCD.
d. Địa chỉ ba vùng nhớ
- Bộ điều khiển LCD có ba vùng nhớ nội, mỗi vùng có chức năng riêng. Bộ điều khiển phải khởi động trước khi truy cập bất kỳ vùng nhớ nào. a. Bộ nhớ DDRAM
- Bộ nhớ chứa dữ liệu để hiển thị (Display Data RAM: DDRAM) lưu trữ những mã ký tự để hiển thị lên màn hình. Mã ký tự lưu trữ trong vùng DDRAM sẽ tham chiếu với từng bitmap kí tự được lưu trữ trong CGROM đã được định nghĩa trước hoặc đặt trong vùng do người sử dụng định nghĩa. b. Bộ phát kí tự ROM – CGROM
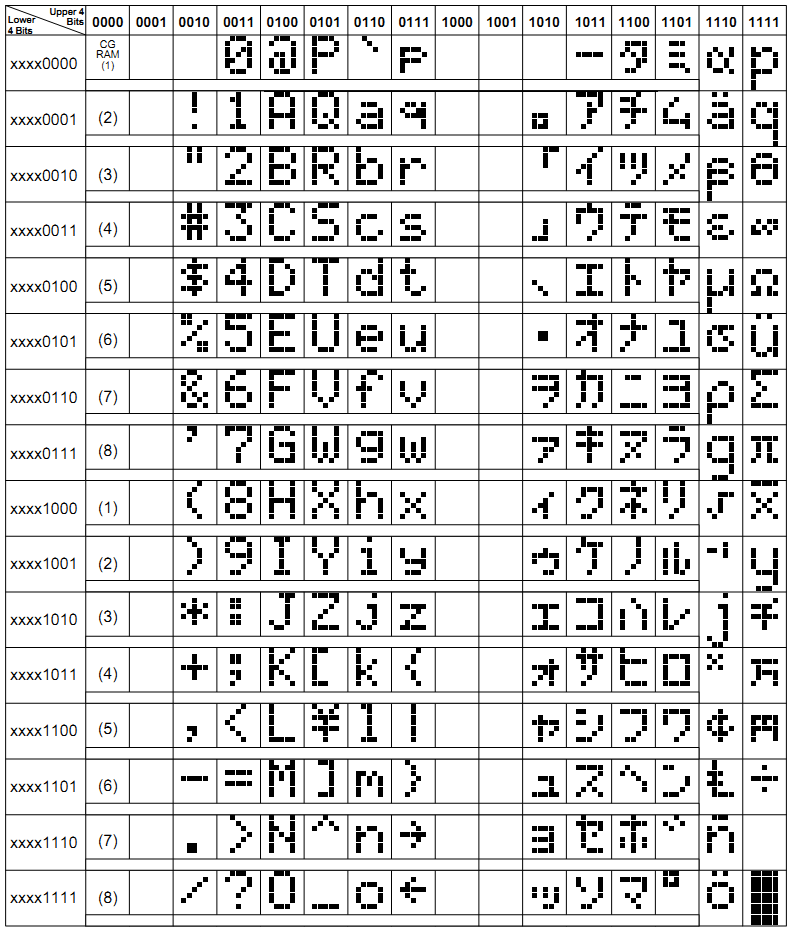
- Bộ phát kí tự ROM (Character Generator ROM: CGROM) chứa các kiểu bitmap cho mỗi kí tự được định nghĩa trước mà LCD có thể hiển thị, như được trình bày bảng mã ASCII. Mã kí tự lưu trong DDRAM cho mỗi vùng kí tự sẽ được tham chiếu đến một vị trí trong CGROM. Ví dụ: mã kí tự số hex 0x53 lưu trong DDRAM được chuyển sang dạng nhị phân 4 bit cao là DB[7:4] = “0101” và 4 bit thấp là DB[3:0] = “0011” chính là kí tự chữ ‘S’ sẽ hiển thị trên màn hình LCD. c. Bộ phát kí tự RAM – CGRAM
- Bộ phát kí tự RAM (Character Generator RAM: CG RAM) cung cấp vùng nhớ để tạo ra 8 kí tự tùy ý. Mỗi kí tự gồm 5 cột và 8 hàng.
e. Các lệnh điều khiển của LCD
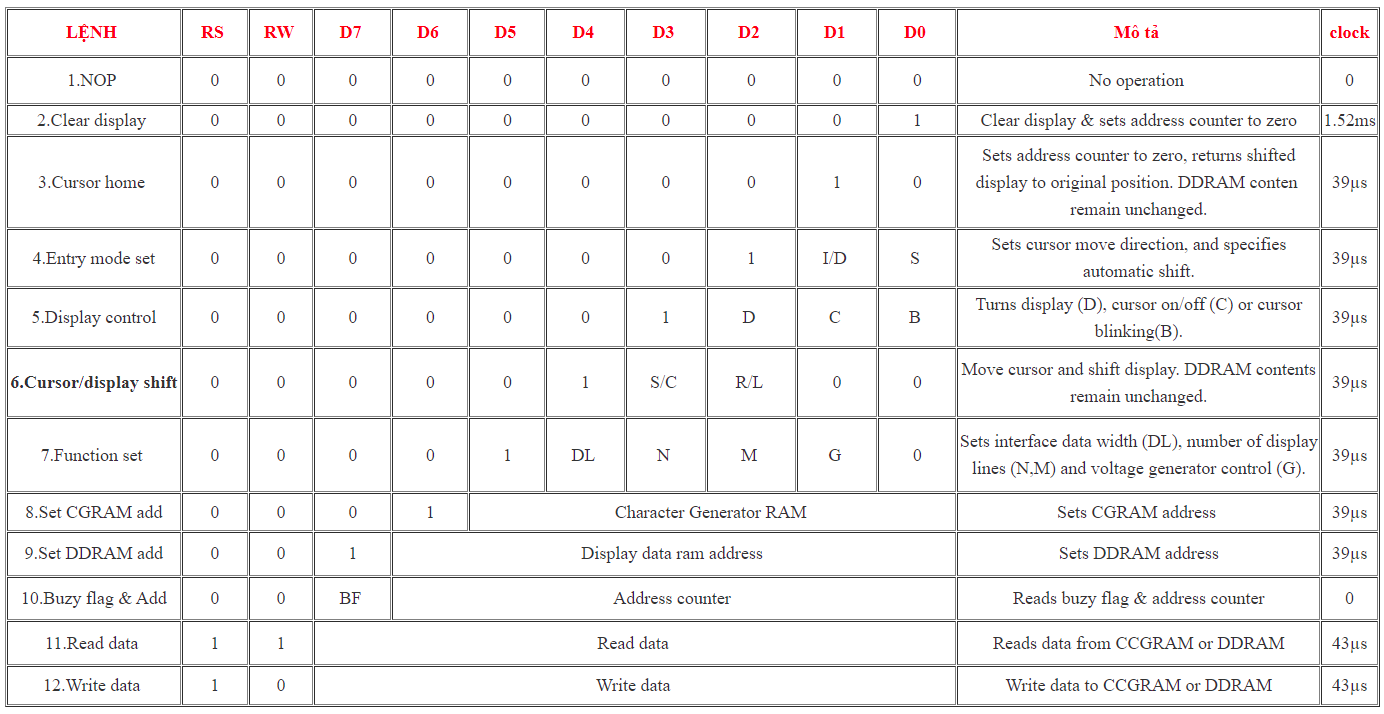
- Lệnh thiết lập chức năng giao tiếp “Function set”:
- Bit DL (data length) = 1 thì cho phép giao tiếp 8 đường data D7 ÷ D0, nếu bằng 0 thì cho phép giao tiếp 4 đường D7 ÷ D4.
- Bit N (number of line) = 1 thì cho phép hiển thị 2 hàng, nếu bằng 0 thì cho phép hiển thị 1 hàng.
- Bit F (font) = 1 thì cho phép hiển thị với ma trận 5×8, nếu bằng 0 thì cho phép hiển thị với ma trận 5×11.
- Các bit cao còn lại là hằng số không đổi.
Lệnh xoá màn hình “Clear Display”: khi thực hiện lệnh này thì LCD sẽ bị xoá và bộ đếm địa chỉ được xoá về 0.
- Lệnh di chuyển con trỏ về đầu màn hình “Cursor Home”: khi thực hiện lệnh này thì bộ đếm địa chỉ được xoá về 0, phần hiển thị trở về vị trí gốc đã bị dịch trước đó. Nội dung bộ nhớ RAM hiển thị DDRAM không bị thay đổi.
- Lệnh thiết lập lối vào “Entry mode set”: lệnh này dùng để thiết lập lối vào cho các kí tự hiển thị,
- Bit I/D = 1 thì con trỏ tự động tăng lên 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị, khi I/D = 0 thì con trỏ sẽ tự động giảm đi 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị.
- Bit S = 1 thì cho phép dịch chuyển dữ liệu mỗi khi nhận 1 byte hiển thị.
Lệnh điều khiển con trỏ hiển thị “Display Control”:
- Bit D: cho phép LCD hiển thị thì D = 1, không cho hiển thị thì bit D = 0.
- Bit C: cho phép con trỏ hiển thị thì C= 1, không cho hiển thị con trỏ thì bit C = 0.
- Bit B: cho phép con trỏ nhấp nháy thì B= 1, không cho con trỏ nhấp nháy thì bit B = 0.
- Với các bit như trên thì để hiển thị phải cho D = 1, 2 bit còn lại thì tùy chọn, trong thư viện thì cho 2 bit đều bằng 0, không cho phép mở con trỏ và nhấp nháy, nếu bạn không thích thì hiệu chỉnh lại.
- Lệnh di chuyển con trỏ “Cursor /Display Shift”: lệnh này dùng để điều khiển di chuyển con trỏ hiển thị dịch chuyển
- Bit SC: SC = 1 cho phép dịch chuyển, SC = 0 thì không cho phép.
- Bit RL xác định hướng dịch chuyển: RL = 1 thì dịch phải, RL = 0 thì dịch trái. Nội dung bộ nhớ DDRAM vẫn không đổi.
- Vậy khi cho phép dịch thì có 2 tùy chọn: dịch trái và dịch phải.
- Lệnh thiết lập địa chỉ cho bộ nhớ RAM phát kí tự “Set CGRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM phát kí tự.
- Lệnh thiết lập địa chỉ cho bộ nhớ RAM hiển thị “Set DDRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM lưu trữ các dữ liệu hiển thị.
- Hai lệnh cuối cùng là lệnh đọc và lệnh ghi dữ liệu LCD.
f. Bảng mã ASCII sử dụng cho LCD
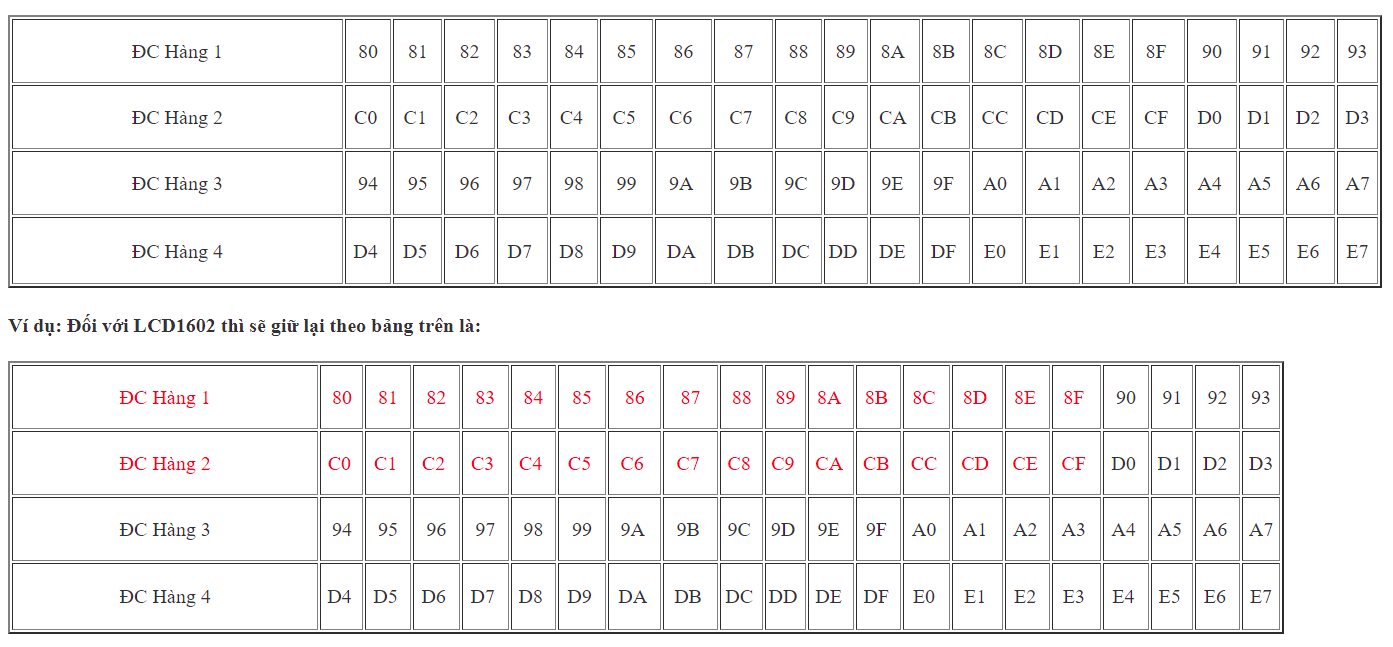
g. Bảng địa chỉ cho LCD
1.5 Module Bluetooth hc05 điều khiển motor giảm tốc dc
a. Giới thiệu Bluetooth HC05
Mạch thu phát Bluetooth HC-05 đã ra chân được thiết kế nhỏ gọn ra chân tín hiệu giao tiếp cơ bản và nút bấm để vào chế độ AT COMMAND, mạch được thiết kế để có thể cấp nguồn và giao tiếp qua 3.3VDC hoặc 5VDC, thích hợp cho nhiều ứng dụng khác nhau: Robot Bluetooth, điều khiển thiết bị qua Bluetooth,… Khi kết nối với máy tính, HC-05 sẽ nhận như 1 cổng COM ảo ở chế độ truyền Haft Duplex tức trong 1 thời điểm chỉ có thể truyền hoặc nhận tín hiệu. Module thu phát Bluetooth HC-05 dùng để thiết lập kết nối Serial giữa 2 thiết bị bằng sóng bluetooth. Điểm đặc biệt của module bluetooth HC-05 là module có thể hoạt động được ở 2 chế độ: MASTER hoặc SLAVE. Trong khi đó, bluetooth module HC-06 chỉ hoạt động ở chế độ SLAVE.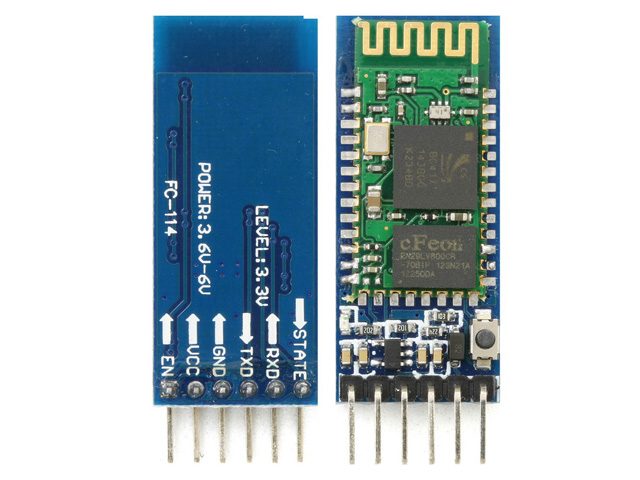
b. Chế độ Master và Slave của module bluetooth hc05
Module bluetooth HC05 master / slave dùng để thiết lập kết nối Serial giữa 2 thiết bị bằng sóng bluetooth. Điểm đặc biệt của module bluetooth HC-05 là module có thể hoạt động được ở 2 chế độ: MASTER hoặc SLAVE. Trong khi đó, bluetooth module HC-06 chỉ hoạt động ở chế độ SLAVE. + Ở chê độ SLAVE: bạn cần thiết lập kết nối từ smartphone, laptop, usb bluetooth để dò tìm module sau đó pair với mã PIN là 1234. Sau khi pair thành công, bạn đã có 1 cổng serial từ xa hoạt động ở baud rate 9600. + Ở chế độ MASTER: module sẽ tự động dò tìm thiết bị bluetooth khác (1 module bluetooth HC-06, usb bluetooth, bluetooth của laptop…) và tiến hành pair chủ động mà không cần thiết lập gì từ máy tính hoặc smartphone.c. Thông số kỹ thuật bluetooth
- Điện áp hoạt động: 3.3 ~ 5VDC
- Mức điện áp chân giao tiếp: TTL tương thích 3.3VDC và 5VDC.
- Dòng điện khi hoạt động: khi Pairing 30 mA, sau khi pairing hoạt động truyền nhận bình thường 8 mA.
- Baudrate UART có thể chọn được: 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200
- Support profiles: Bluetooth serial port (master and slave)
- Bluetooth protocol: Bluetooth specification v2.0 + EDR
- Frequency: 2.4 GHz ISM band
- Modulation: GFSK (Gaussian frequency shift keying)
- Transmit power: =4 dBm, class 2
- Sensitivity: =-84 dBm at 0.1% BER
- Rate: Asynchronous: 2.1 Mbps (max.)/160 kbps
- Synchronous: 1 Mbps/1 Mbps
- Security features: authentication and encryption
- Kích thước: 15.2 x 35.7 x 5.6mm
d. Thiết lập mặc định module HC05
- Thiết lập UART mặc định: Baudrate 9600, N, 8, 1.
- Pairing code mặc định: 1234 hoặc 0000.
- Để vào chế độ AT COMMAND, bấm và giữ nút trước khi cấp nguồn, LED sẽ nháy 2s. baud rate cho chế đọ AT COMMAND là 38400. Chân Tx nối với chân Rx. Lưu ý các lệnh AT đều là chữa in hoa.
- Cấp nguồn và không nhấn nút sẽ chạy bình thường. LED sẽ nháy nhanh
- Chân EN chỉ nhận mức logic TTL 3V3. Không có chức năng chọn vào chế độ AT COMMAND.
e. Nguyên lý hoạt động module HC05
Module có 2 chế độ làm việc (có thể lựa chọn chế độ làm việc bằng cách thay đổi trạng thái chân 34 KEY): Tự động kết nối. Đáp ứng theo lệnh: khi làm việc ở chế độ này, các bạn có thể gửi các lệnh AT để giao tiếp với module.- Module HC05 có thể nhận 1 trong 3 chức năng: Master, Slave, Loopback (có thể lựa chọn các chức năng bằng lệnh AT).
- Giao tiếp với module bằng giao tiếp nối tiếp không đồng bộ qua 2 đường RX và TX, vì vậy các bạn có thể sử dụng PC với chuẩn RS232 hoặc các dòng vi điều khiển để giao tiếp. Bằng cách thay đổi trạng thái chân 34 (KEY), bạn có thể cấu hình chế độ hoạt động cho module:
- Để module làm việc ở chế độ kết nối tự động: KEY phải ở trạng thái Floating (trạng thái không kết nối).
- Để module làm việc ở chế độ đáp ứng theo lệnh: KEY = ‘0’ (kết nối xuống đất)àCấp nguồn cho module à chuyển KEY = ‘1’ (kết nối lên VCC) lúc này có thể sử dụng các lệnh AT để giao tiếp.
f. Các tập lệnh AT cơ bản của Bluetooth HC05
AT<CR><LF> // kiểm tra giao tiếp, trả về OK AT+NAME?<CR><LF> // kiểm tra tên bluetooth, trả về tên bluetooth AT+NAME=””<CR><LF> // đặt lại tên bluetooth, thêm dữ liệu vào 2 dấu “ “ AT+PSWD?<CR><LF> // kiểm tra mật khẩu, trả về mật khẩu của bluetooth AT+PSWD=””<CR><LF> // đặt lại mật khẩu, thêm dữ liệu vào 2 dấu “ ” AT+ADDR?<CR><LF> // kiểm tra địa chỉ bluetooth, trả về địa chỉ bluetooth AT+ROLE?<CR><LF> // kiểm tra chế độ hoạt động AT+VERSION?<CR><LF> // trả về firmware hiện tại của bluetooth AT+UART=9600,0,0?<CR><LF> // ( thiết lập baudrate 9600,1 bit stop, no parity)Các lệnh ở chế độ Master của HC05:
AT+RMAAD?<CR><LF> // ngắt kết nối với các thiết bị đã ghép AT+ROLE=1<CR><LF> // đặt là module ở master AT+RESET<CR><LF> // reset lại thiết bị AT+CMODE=0<CR><LF> // Cho phép kết nối với bất kì địa chỉ nào AT+INQM=0,5,5<CR><LF> // Dừng tìm kiếm thiết bị khi đã tìm được 5 thiết bị hoặc sau 5s AT+INQ<CR><LF> // Bắt đầu tìm kiếm thiết bị để ghép nối Sau lệnh này một loạt các thiết bị tìm thấy được hiện thị. Định ra kết quả sau lệnh này như sau INQ:address,type,signal Phần địa chỉ (address) sẽ có định dạng như sau: 0123:4:567890. Để sử dụng địa chỉ này trong các lệnh tiếp theo ta phải thay dấu “:” thành “,” 0123:4:567890 -> 0123,4,5678 AT+PAIR=<address>,<timeout><CR><LF> // Đặt timeout(s) khi kết nối với 1 địa chỉ slave AT+LINK=<address><CR><LF> // Kết nối với slaveCác lệnh ở chế độ Slave của HC05:
AT+ORGL<CR><LF> // Reset lại cài đặt mặc định AT+RMAAD<CR><LF> // Xóa mọi thiết bị đã ghép nối AT+ROLE=0<CR><LF> // Đặt là chế độ SLAVE AT+ADDR<CR><LF> // Hiển thị địa chỉ của SLAVE2. Hướng dẫn đồ án module Bluetooth HC05 giao tiếp Pic16F điều khiển động cơ motor giảm tốc
Phần này chưa được chia sẻ.
LIÊN HỆ thông tin ở TẠI ĐÂY để được hổ trợ tốt hơn.
Phần cứng
Phần mềm
Tải App apk giao tiếp Bluetooth: Tại đây#define enA 9
#define in1 4
#define in2 5
#define enB 10
#define in3 6
#define in4 7
int xAxis, yAxis;
int x = 0;
int y = 0;
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
Serial.begin(38400); // Default communication rate of the Bluetooth module
}
void loop() {
// Default value - no movement when the Joystick stays in the center
xAxis = 510;
yAxis = 510;
// Read the incoming data from the Smartphone Android App
while (Serial.available() >= 2) {
x = Serial.read();
delay(10);
y = Serial.read();
}
delay(10);
// Makes sure we receive corrent values
if (x > 60 & x < 220) {
xAxis = map(x, 220, 60, 1023, 0); // Convert the smartphone X and Y values to 0 - 1023 range, suitable motor for the motor control code below
}
if (y > 60 & y < 220) {
yAxis = map(y, 220, 60, 0, 1023);
}
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
else if (yAxis > 550) {
// Set Motor A forward
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// Set Motor B forward
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Convert the increasing Y-axis readings for going forward from 550 to 1023 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 550, 1023, 0, 255);
motorSpeedB = map(yAxis, 550, 1023, 0, 255);
}
// If joystick stays in middle the motors are not moving
else {
motorSpeedA = 0;
motorSpeedB = 0;
}
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
if (xAxis > 550) {
// Convert the increasing X-axis readings from 550 to 1023 into 0 to 255 value
int xMapped = map(xAxis, 550, 1023, 0, 255);
// Move right - decrease right motor speed, increase left motor speed
motorSpeedA = motorSpeedA + xMapped;
motorSpeedB = motorSpeedB - xMapped;
// Confine the range from 0 to 255
if (motorSpeedA > 255) {
motorSpeedA = 255;
}
if (motorSpeedB < 0) {
motorSpeedB = 0;
}
}
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
}3. Hoạt động của mạch điều khiển motor giảm tốc bằng module bluetooth
Khi cấp điện hệ thống hoạt động, các động cơ motor giảm tốc dừng. Chờ khoản 5 giây khi module bluetooth hc05 ổn định sẽ cho phép kết nối từ điện thoại với bluetooth hc05. Từ điện thoại mở ứng dụng đã được lập trình sẵn dùng để điều khiển các chế độ của động cơ như chạy, dừng, nhanh chậm, thuận nghịch. Khi vi điều khiển nhận tín hiệu từ bluetooth hc05 gửi xuống sẽ cho phép motor giảm tốc quay theo yêu cầu đã được lập trình sẵn.4. Cụ thể hoạt động của mạch điều khiển motor giảm tốc dc
Ngoài ra còn nhiều Phần và các môn khác
Đồ án điện tử, Lập trình vi điều khiển tổng hợp File đồ án – Phần 1 Mạch điện tử, Lập trình vi điều khiển tổng hợp File đồ án – Phần 2 Thiết kế mạch điện tử, Lập trình vi điều khiển tổng hợp File đồ án – Phần 3 Vi xử lý, Lập trình vi điều khiển Pic – 8051 – Avr – Phần 4 Tổng hợp File ĐỒ ÁN Điện tử cơ bản Tổng hợp File ĐỒ ÁN Viễn thông Tổng hợp File ĐỒ ÁN PLC Tổng hợp File ĐỒ ÁN Cung cấp điện
Chúc các bạn thành công…!!!