
RF315 4 Kênh giao tiếp Pic16F dùng Module Thu Phát RF315 dùng để thu tìn hiệu từ điều khiển từ xa hoặc sử dụng trong các điều khiển từ xa. Module thu phát RF315 nào được sử dụng trong điều khiển từ xa cho xe hơi, hoặc để điều khiển các tác vụ đơn giản, giống như tiếp sức kiểm soát bật / tắt việc sử dụng một ăng-ten tùy chọn sẽ làm tăng hiệu quả của truyền thông không dây của bạn.
- Phone : 0967.551.477
- Zalo : 0967.551.477
- FB : Huỳnh Nhật Tùng
- Email : dientunhattung@gmail.com
- Địa Chỉ: 106/14 Đường số 51, Phường 14, Gò Vấp, Tp HCM
- Chi tiết: Nhận làm mạch và đồ án Điện tử
Table of Contents
1. Linh kiện cần thiết làm mạch điều khiển thiết bị bằng thu, phát RF315 4 Kênh giao tiếp Pic16F
1.1 Vi điều khiển PIC trong mạch điều khiển thiết bị bằng thu, phát RF315 4 Kênh giao tiếp Pic16F
a. Giới thiệu
- PIC là một họ vi điều khiển RISC được sản xuất bởi công ty Microchip Technology.
- Dòng PIC đầu tiên là PIC1650 sau đó phát triển lên nhiều dòng khác nhau như:
- Pic10F
- Pic12F
- Pic16F
- Pic18F
- Pic24F
- Pic32F
 Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit. Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt. Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, …
Vi xử lý có rất nhiều loại bắt đầu từ 4 bit cho đến 32 bit, vi xử lý 4 bit hiện nay không còn nhưng vi xử lý 8 bit vẫn còn mặc dù đã có vi xử lý 64 bit. Lý do sự tồn tại của vi xử lý 8 bit là phù hợp với một số yêu cầu điều khiển trong công nghiệp. Các vi xử lý 32 bit, 64 bit thường sử dụng cho các máy tính vì khối lượng dữ liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt. Các hệ thống điều khiển trong công nghiệp sử dụng các vi xử lý 8 bit hay 16 bit như hệ thống điện của xe hơi, hệ thống điều hòa, hệ thống điều khiển các dây chuyền sản xuất, … 
b. Đặc điểm thực thi tốc độ cao CPU RISC là:
- Có 35 lệnh đơn.
- Thời gian thực hiện tất cả các lệnh là 1 chu kì máy, ngoại trừ lệnh rẽ nhánh là 2.
- Tốc độ hoạt động: + Ngõ vào xung clock có tần số 20MHz. + Chu kì lệnh thực hiện lệnh 200ns.
- Có nhiều nguồn ngắt.
- Có 3 kiểu định địa chỉ trực tiếp, gián tiếp và tức thời.
c. Cấu trúc đặc biệt của vi điều khiển
- Bộ dao động nội chính xác + Sai số ± 1% + Có thể lựa chọn tần số từ 31 kHz đến 8 Mhz bằng phần mềm. + Cộng hưởng bằng phần mềm. + Chế độ bắt đầu 2 cấp tốc độ. + Mạch phát hiện hỏng dao động thạch anh cho các ứng dụng quan trọng. + Có chuyển mạch nguồn xung clock trong quá trình hoạt động để tiết kiệm công suất.
- Có chế độ ngủ để tiết kiệm công suất.
- Dãy điện áp hoạt động rộng từ 2V đến 5,5V.
- Tầm nhiệt độ làm việc theo chuẩn công nghiệp.
- Có mạch reset khi có điện (Power On Reset – POR).
- Có bộ định thời chờ ổn định điện áp khi mới có điện (Power up Timer – PWRT) và bộ định thời chờ dao động hoạt động ổn định khi mới cấp điện (Oscillator Startup Timer – OST).
- Có mạch tự động reset khi phát hiện nguồn điện cấp bị sụt giảm, cho phép lựa chọn bằng phần mềm (Brown out Reset – BOR).
- Có bộ định thời giám sát (Watchdog Timer – WDT) dùng dao động trong chip cho phép bằng phần mềm (có thể định thời lên đến 268 giây).
- Đa hợp ngõ vào reset với ngõ vào có điện trở kéo lên.
- Có bảo vệ code đã lập trình.
- Bộ nhớ Flash cho phép xóa và lập trình 100,000 lần.
- Bộ nhớ Eeprom cho phép xóa và lập trình 1,000,000 lần và có thể tồn tại trên 40 năm.
- Cho phép đọc/ghi bộ nhớ chương trình khi mạch hoạt động.
- Có tích hợp mạch gỡ rối.
d. Cấu trúc nguồn công suất thấp
- Chế độ chờ: dòng tiêu tán khoảng 50nA, sử dụng nguồn 2V.
- Dòng hoạt động. + 11µA ở tần số hoạt động 32kHz, sử dụng nguồn 2V. + 220µA ở tần số hoạt động 4MHz, sử dụng nguồn 2V.
- Bộ định thời Watchdog Timer khi hoạt động tiêu thụ 1,4µA, điện áp 2V.
e. Cấu trúc ngoại vi
- Có 35 chân I/O cho phép lựa chọn hướng độc lập: + Mỗi ngõ ra có thể nhận/cấp dòng lớn khoảng 25mA nên có thể trực tiếp điều khiển led + Có các port báo ngắt khi có thay đổi mức logic. + Có các port có điện trở kéo lên bên trong có thể lập trình. + Có ngõ vào báo thức khỏi chế độ công suất cực thấp.
- Có module so sánh tương tự: + Có 2 bộ so sánh điện áp tương tự + Có module nguồn điện áp tham chiếu có thể lập trình. + Có nguồn điện áp tham chiếu cố định có giá trị bằng 0,6V. + Có các ngõ vào và các ngõ ra của bộ so sánh điện áp. + Có chế độ chốt SR.
Có bộ chuyển đổi tương tự sang số: Có 14 bộ chuyển đổi tương tự với độ phân giải 10 bit.
- Có timer0: 8 bit hoạt động định thời/đếm xung ngoại có bộ chia trước có thể lập trình.
- Có timer1: + 16 bit hoạt động định thời/đếm xung ngoại có bộ chia trước có thể lập trình. + Có ngõ vào cổng của timer1 để có thể điều khiển timer1 đếm từ tín hiệu bên ngoài. + Có bộ dao động công suất thấp có tần số 32kHz.
- Có timer2: 8 bit hoạt động định thời với thanh ghi chu kỳ, có bộ chia trước và chia sau.
- Có module capture, compare và điều chế xung PWM+ nâng cao + Có bộ capture 16 bit có thể đếm được xung với độ phân giải cao nhất là 12,5ns. + Có bộ điều chế xung PWM với số kênh ngõ ra là 1, 2 hoặc 4, có thể lập trình với tần số lớn nhất là 20kHz. + Có ngõ ra PWM điều khiển lái.
- Có module capture, compare và điều chế xung PWM + Có bộ capture 16 bit có thể đếm được xung với chu kỳ cao nhất là 12,5ns. + Có bộ so sánh 16 bit có thể so sánh xung đếm với chu kỳ lớn nhất là 200ns + Có bộ điều chế xung PWM có thể lập trình với tần số lớn nhất là 20kHz.
- Có thể lập trình trên bo ISP thông qua 2 chân.
- Có module truyền dữ liệu nối tiếp đồng bộ MSSP hổ trợ chuẩn truyền 3 dây SPI, chuẩn I2C ở 2 chế độ chủ và tớ.
f. Cấu trúc của vi điều khiển
 Các khối bên trong vi điều khiển bao gồm:
Các khối bên trong vi điều khiển bao gồm:- Có khối thanh ghi định cấu hình cho vi điều khiển.
- Có khối bộ nhớ chương trình có nhiều dung lượng cho 5 loại khác nhau.
- Có khối bộ nhớ ngăn xếp 8 cấp (8 level stack).
- Có khối bộ nhớ Ram cùng với thanh ghi FSR để tính toán tạo địa chỉ cho 2 cách truy xuất gián tiếp và trực tiếp.
- Có thanh ghi lệnh (Instruction register) dùng để lưu mã lệnh nhận về từ bộ nhớ chương trình.
g. Cấu hình bên trong của vi điều khiển
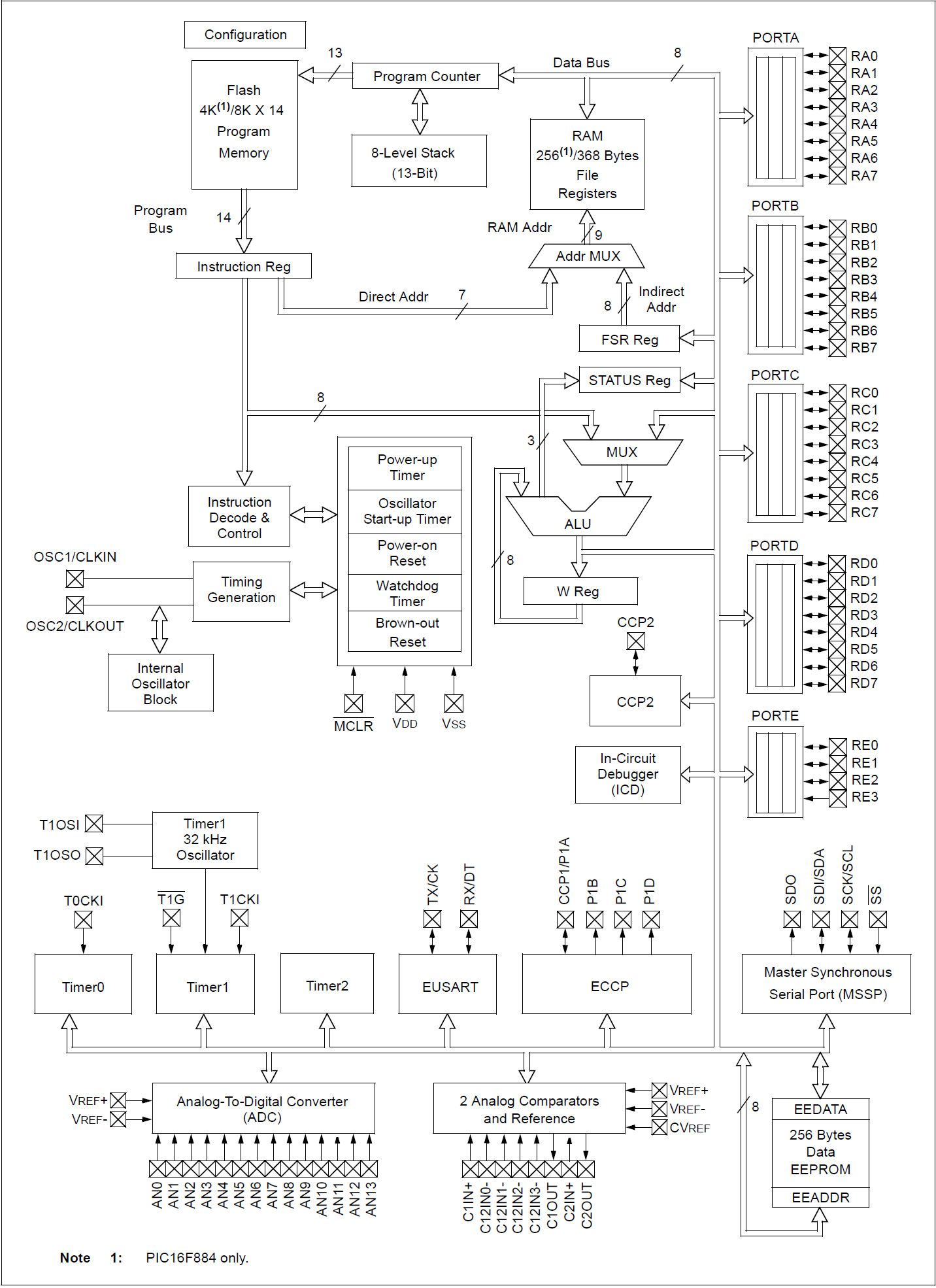
- Có thanh ghi trạng thái (status register) cho biết trạng thái sau khi tính toán của khối ALU.
- Có thanh ghi FSR.
- Có khối ALU cùng với thanh ghi working hay thanh ghi A để xử lý dữ liệu.
- Có khối giải mã lệnh và điều khiển (Instruction Decode and Control).
- Có khối dao động nội (Internal Oscillator Block).
- Có khối dao động kết nối với 2 ngõ vào OSC1 và OSC2 để tạo dao động.
- Có khối các bộ định thời khi cấp điện PUT, có bộ định thời chờ dao động ổn định, có mạch reset khi có điện, có bộ định thời giám sát watchdog, có mạch reset khi phát hiện sụt giảm nguồn.
- Có khối bộ dao động cho timer1 có tần số 32kHz kết nối với 2 ngõ vào T1OSI và T1OSO.
- Có khối CCP2 và ECCP.
- Có khối mạch gỡ rối (In-Circuit Debugger IDC).
- Có khối timer0 với ngõ vào xung đếm từ bên ngoài là T0CKI.
- Có khối truyền dữ liệu đồng bộ/bất đồng bộ nâng cao.
- Có khối truyền dữ liệu đồng bộ MSSP cho SPI và I2C.
- Có khối bộ nhớ Eeprom 256 byte và thanh ghi quản lý địa chỉ EEADDR và thanh ghi dữ liệu EEDATA.
- Có khối chuyển đổi tín hiệu tương tự sang số ADC.
- Có khối 2 bộ so sánh với nhiều ngõ vào ra và điện áp tham chiếu.
- Có khối các port A, B, C, E và D
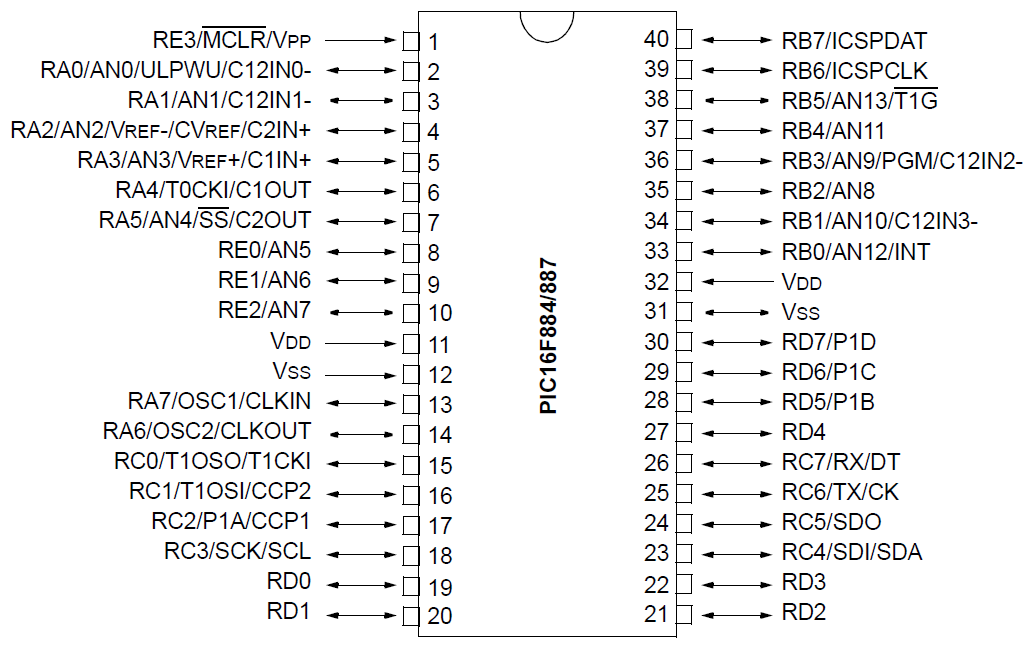
a. Chức năng các chân của portA
- Chân RA0/AN0/ULPWU/C12IN0- (2): có 4 chức năng: + RA0: xuất/ nhập số – bit thứ 0 của port A. + AN0: ngõ vào tương tự của kênh thứ 0.
- Chân RA1/AN1/C12IN1- (3): có 3 chức năng: + RA1: xuất/nhập số – bit thứ 1 của port A. + AN1: ngõ vào tương tự của kênh thứ 1
- Chân RA2/AN2/VREF-/CVREF/C2IN+ (4): có 5 chức năng: + RA2: xuất/nhập số – bit thứ 2 của port A. + AN2: ngõ vào tương tự của kênh thứ 2. + VREF-: ngõ vào điện áp chuẩn (thấp) của bộ ADC. + CVREF: điện áp tham chiếu VREF ngõ vào bộ so sánh.
- Chân RA3/AN3/VREF+/C1IN+ (5): có 4 chức năng: + RA3: xuất/nhập số – bit thứ 3 của port A. + AN3: ngõ vào tương tự kênh thứ 3. + VREF+: ngõ vào điện áp chuẩn (cao) của bộ A/D. + C1IN+: ngõ vào dương của bộ so sánh C1. + Chân RA4/TOCKI/C1OUT (6): có 3 chức năng:
- RA4: xuất/nhập số – bit thứ 4 của port A. + TOCKI: ngõ vào xung clock từ bên ngoài cho Timer0. + C1OUT: ngõ ra bộ so sánh 1. + Chân RA5/AN4/ SS / C2OUT (7): có 4 chức năng: + RA5: xuất/nhập số – bit thứ 5 của port A. + AN4: ngõ vào tương tự kênh thứ 4. + SS : ngõ vào chọn lựa SPI tớ (Slave SPI device). + C2OUT: ngõ ra bộ so sánh 2.
- Chân RA6/OSC2/CLKOUT (14): có 3 chức năng: + RA6: xuất/nhập số – bit thứ 6 của port A. + OSC2: ngõ ra dao động thạch anh. Kết nối đến thạch anh hoặc bộ cộng hưởng.
- Chân RA7/OSC1/CLKIN (13): có 3 chức năng. + RA7: xuất/nhập số – bit thứ 7 của port A. + OSC1: ngõ vào dao động thạch anh hoặc ngõ vào nguồn xung ở bên ngoài.
b. Chức năng các chân của portB
- Chân RB0/AN12/INT (33): có 3 chức năng: + RB0: xuất/nhập số – bit thứ 0 của port B. + AN12: ngõ vào tương tự kênh thứ 12. + INT: ngõ vào nhận tín hiệu ngắt ngoài. + Chân RB1/AN10/C12IN3- (34): có 3 chức năng:
- RB1: xuất/nhập số – bit thứ 1 của port B. + AN10: ngõ vào tương tự kênh thứ 10. + C12IN3-: ngõ vào âm thứ 3 của bộ so sánh C1 hoặc C2. + Chân RB2/AN8 (35): có 2 chức năng:
- RB2: xuất/nhập số – bit thứ 2 của port B. + AN8: ngõ vào tương tự kênh thứ 8. + Chân RB3/AN9/PGM/C12IN2 (36): có 4 chức năng:
- RB3: xuất/nhập số – bit thứ 3 của port B. + AN9: ngõ vào tương tự kênh thứ 9. + PGM: Chân cho phép lập trình điện áp thấp ICSP. + C12IN1-: ngõ vào âm thứ 2 của bộ so sánh C1 hoặc C2 + Chân RB4/AN11 (37): có 2 chức năng:
- RB4: xuất/nhập số – bit thứ 4 của port B. + AN11: ngõ vào tương tự kênh thứ 11. + Chân RB5/ AN13/T1G (38): có 3 chức năng:
- RB5: xuất/nhập số – bit thứ 5 của port B. + AN13: ngõ vào tương tự kênh thứ 13. + T1G (Timer1 gate input): ngõ vào Gate cho phép time1 đếm dùng để đếm độ rộng xung. + Chân RB6/ICSPCLK (39): có 2 chức năng:
- RB6: xuất/nhập số. + ICSPCLK: xung clock lập trình nối tiếp. + Chân RB7/ICSPDAT (40): có 2 chức năng:
- RB7: xuất/nhập số. + ICSPDAT: ngõ xuất nhập dữ liệu lập trình nối tiếp.
c. Chức năng các chân của portC
- Chân RC0/T1OSO/T1CKI (15): có 3 chức năng: + RC0: xuất/nhập số – bit thứ 0 của port C. + T1OSO: ngõ ra của bộ dao động Timer1. + T1CKI: ngõ vào xung clock từ bên ngoài Timer1.
- Chân RC1/T1OSI/CCP2 (16): có 3 chức năng: + RC1: xuất/nhập số – bit thứ 1 của port C. + T1OSI: ngõ vào của bộ dao động Timer1. + CCP2: ngõ vào Capture2, ngõ ra compare2, ngõ ra PWM2.
- Chân RC2 /P1A/CCP1 (17): có 3 chức năng: + RC2: xuất/nhập số – bit thứ 2 của port C. + P1A: ngõ ra PWM. + CCP1: ngõ vào Capture1, ngõ ra compare1, ngõ ra PWM1.
- Chân RC3/SCK/SCL (18): có 3 chức năng: + RC3: xuất/nhập số – bit thứ 3 của port C. + SCK: ngõ vào xung clock nối tiếp đồng bộ/ngõ ra của chế độ SPI. + SCL: ngõ vào xung clock nối tiếp đồng bộ/ngõ ra của chế độ I2C.
- Chân RC4/SDI/SDA (23): có 3 chức năng: + RC4: xuất/nhập số – bit thứ 4 của port C. + SDI: ngõ vào dữ liệu trong truyền dữ liệu kiểu SPI. + SDA: xuất/nhập dữ liệu I2C.
- Chân RC5/SDO (24): có 2 chức năng: + RC5: xuất/nhập số – bit thứ 5 của port C. + SDO: ngõ xuất dữ liệu trong truyền dữ liệu kiểu SPI.
- Chân RC6/TX/CK (25): có 3 chức năng: + RC6: xuất/nhập số – bit thứ 6 của port C. + TX: ngõ ra phát dữ liệu trong chế độ truyền bất đồng bộ USART. + CK: ngõ ra cấp xung clock trong chế độ truyền đồng bộ USART.
- Chân RC7/RX/DT (26): có 3 chức năng: + RC7: xuất/nhập số – bit thứ 7 của port C. + RX: ngõ vào nhận dữ liệu trong chế độ truyền bất đồng bộ EUSART. + DT: ngõ phát và nhận dữ liệu ở chế độ truyền đồng bộ EUSART.
d. Chức năng các chân của portD
- Chân RD0 (19): có 1 chức năng: + RD0: xuất/nhập số – bit thứ 0 của port D.
- Chân RD1 (20): có 1 chức năng: + RD1: xuất/nhập số – bit thứ 1 của port D.
- Chân RD2 (21): có 1 chức năng: + RD2: xuất/nhập số – bit thứ 2 của port D.
- Chân RD3 (22): có 1 chức năng: + RD3: xuất/nhập số – bit thứ 3 của port D.
- Chân RD4 (27): có 1 chức năng: + RD4: xuất/nhập số – bit thứ 4 của port D.
- Chân RD5/ P1B (28): có 2 chức năng: + RD5: xuất/nhập số – bit thứ 5 của port D. + P1B: ngõ ra PWM.
- Chân RD6/ P1C (29): có 2 chức năng: + RD6: xuất/nhập số – bit thứ 6 của port D. + P1C: ngõ ra PWM.
- Chân RD7/P1D (30): có 2 chức năng: + RD7: xuất/nhập số – bit thứ 7 của port D. + P1D: ngõ ra tăng cường CPP1
e. Chức năng các chân của portE
- Chân RE0/AN5 (8): có 2 chức năng: + RE0: xuất/nhập số. + AN5: ngõ vào tương tự 5.
- Chân RE1/AN6 (9): có 2 chức năng: + RE1: xuất/nhập số. + AN6: ngõ vào tương tự kênh thứ 6.
- Chân RE2/AN7 (10): có 2 chức năng: + RE2: xuất/nhập số. + AN7: ngõ vào tương tự kênh thứ 7.
- Chân RE3/ MCLR /VPP (1): có 3 chức năng: + RE3: xuất/nhập số – bit thứ 3 của port E. + MCLR : là ngõ vào reset tích cực mức thấp. + VPP: ngõ vào nhận điện áp khi ghi dữ liệu vào bộ nhớ nội flash. + Chân VDD (11), (32): + Nguồn cung cấp dương từ 2V đến 5V. + Chân VSS (12), (31): + Nguồn cung cấp 0V.
1.2 RF315 dùng cho thu, phát RF315 4 Kênh giao tiếp Pic16F
a. Giới thiệu
Module Thu Phát RF 315 dùng để thu tìn hiệu từ điều khiển từ xa hoặc sử dụng trong các điều khiển từ xa. Module thu phát RF315 nào được sử dụng trong điều khiển từ xa cho xe hơi, hoặc để điều khiển các tác vụ đơn giản, giống như tiếp sức kiểm soát bật / tắt việc sử dụng một ăng-ten tùy chọn sẽ làm tăng hiệu quả của truyền thông không dây của bạn.

b. Thông số kỹ thuật thu, phát RF315 4 Kênh
Remote thu 4 Kênh Pt2272
- Điện áp hoạt động: 12VDC (27A / 12V battery x 1)
- Dòng tiêu thụ: 10mA at 12V
- Radiated power: 10mW at 12V
- Khoảng cách phát: 50m(Theo thông số nhà sản xuất thử nghiệm trong điều kiện lý tưởng)
- Tần số RF hoạt động: 315MHZ
- Modulation mode: ASK (Amplitude Modulation)
- Encoder types: fixed code
- Dòng tiêu thụ ở trạng thái không hoạt động: 4.5mA.
- Nhiệt độ hoạt động: – 10 ~ 70oC.
Mạch thu không gắn chip giao tiếp Pic16F
- Model: MX-05V.
- Điện áp hoạt động: 5VDC.
- Quiescent Current: 4mA.
- Tần số nhận: 315Mhz.
- Receiving sensitivity: – 105dB.
- Kích thước: 30 * 14 * 7mm.
- Anten cần lắp thêm: dài 32cm đơn lõi, có thể cuộn tròn.
Mạch phát không gắn chip
- Model: MX-FS-03V.
- Khoảng cách truyền: 20200m(điện áp cấp càng cao, truyền càng xa).
- Điện áp cấp: 3.5-12VDC.
- Kích thước: 19*19mm.
- Tốc độ truyền: 4Kb/s.
- Công suất truyền: 10mW.
- Tần số truyền: 315Mhz.
- Anten cần gắn thêm: dài 25cm đơn lõi có thể cuộn tròn.
- Thứ tự chân: DATA, VCC, GND.
c. Chức năng các chân thu phát RF315 4 Kênh
- Dữ liệu vào DATA
- Nguồn Cung Cấp Vcc
- GND
d. Lưu ý khi dùng
Khoảng cách không có Anten là 20Cm. Nếu bạn cần khoảng cách xa, bạn phải thêm Anten = 1/4 bước sóng. Sử dụng chiều dài Anten cho 315Mhz là 23Cm, Cho 433Mhz là 17Cm. Điện trở nội của dây là 50R ( Ôm).
1.3 Relay kích thiết bị 220v cho mạch thu, phát RF315 4 Kênh giao tiếp Pic16F
a. Giới thiệu
Rơ le (relay) là một công tắc chuyển đổi, dùng để đóng cắt mạch điều khiển, nó hoạt động bằng điện. Nó là một công tắc vì có 2 trạng thái ON và OFF. Rơ le ở trạng thái ON hay OFF phụ thuộc vào có dòng điện chạy qua rơ le hay không.

b. Thông số kỹ thuật
- Điện áp điều khiển: 5V
- Dòng điện cực đại: 10A
- Thời gian tác động: 10ms
- Thời gian nhả hãm: 5ms
- Nhiệt độ hoạt động: -45oC ~ 75oC
2. Hướng dẫn đồ án thu, phát RF315 4 Kênh giao tiếp Pic16F bật tắt thiết bị 220V qua relay
Phần này chưa được chia sẻ.
LIÊN HỆ thông tin ở TẠI ĐÂY để được hổ trợ tốt hơn.
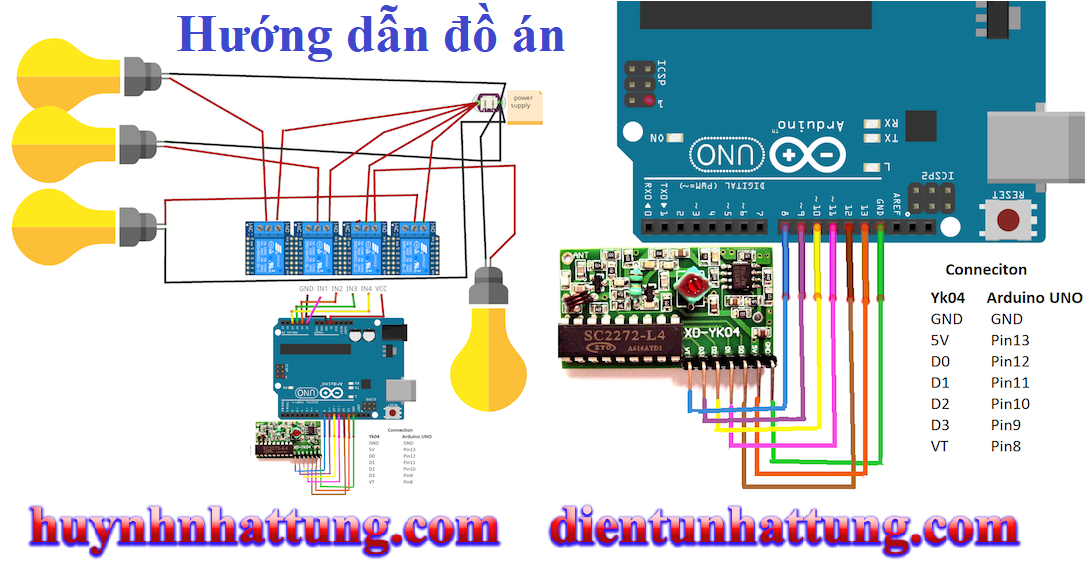
Phần cứng
Phần mềm
Thư viện rm4.h tài tại đây: https://github.com/msparks/arduino-rm4
#include <rm4.h>
static const int kEnablePin = 13;
// Arduino pins connected to the data pins on the receiver.
static const int kData0Pin = 9;
static const int kData1Pin = 10;
static const int kData2Pin = 11;
static const int kData3Pin = 12;
const int relay1 = 14; // the number of the relay1 pin
const int relay2 = 15; // the number of the relay1 pin
const int relay3 = 16; // the number of the relay1 pin
const int relay4 = 17; // the number of the relay1 pin
// Create an RM4 object to read the button codes from the remote.
RM4 remote(kData0Pin, kData1Pin, kData2Pin, kData3Pin);
void setup() {
// Initialize the serial interface.
Serial.begin(9600);
// Turn on the receiver.
pinMode(kEnablePin, OUTPUT);
digitalWrite(kEnablePin, HIGH);
pinMode(relay1, OUTPUT);
pinMode(relay2, OUTPUT);
pinMode(relay3, OUTPUT);
pinMode(relay4, OUTPUT);
}
void loop() {
// Print the button code to the serial interface every 100 ms.
const int button_code = remote.buttonCode();
if (button_code == 8) { // pin 2 is pressed and connected to GND so it will be LOW
digitalWrite(relay1, LOW); // remove 5v from pin 11 so relay in1 will be 0v and this make relay on
delay (2000); // wait 1 second
} else {
digitalWrite(relay1, HIGH); // add 5v to arduino pin 11 so relay in1 will be 5v and this make relay off
}
if (button_code == 2) { // pin 2 is pressed and connected to GND so it will be LOW
digitalWrite(relay2, LOW); // remove 5v from pin 11 so relay in1 will be 0v and this make relay on
delay (2000); // wait 1 second
} else {
digitalWrite(relay2, HIGH); // add 5v to arduino pin 11 so relay in1 will be 5v and this make relay off
}
if (button_code == 1) { // pin 2 is pressed and connected to GND so it will be LOW
digitalWrite(relay3, LOW); // remove 5v from pin 11 so relay in1 will be 0v and this make relay on
delay (2000); // wait 1 second
} else {
digitalWrite(relay3, HIGH); // add 5v to arduino pin 11 so relay in1 will be 5v and this make relay off
}
if (button_code == 4) { // pin 2 is pressed and connected to GND so it will be LOW
digitalWrite(relay4, LOW); // remove 5v from pin 11 so relay in1 will be 0v and this make relay on
delay (2000); // wait 1 second
} else {
digitalWrite(relay4, HIGH); // add 5v to arduino pin 11 so relay in1 will be 5v and this make relay off
}
// Serial.println(button_code);
// delay(100);
}3. Hoạt động của mạch điều khiển thiết bị bằng thu, phát RF315 4 Kênh
Khi cấp điện hệ thống hoạt động, các thiết bị ban đầu tắt, vi điều khiển chờ tín hiệu từ bộ thu, phát RF315 4 Kênh giao tiếp Pic16F được phát bởi remote rf315 4 kênh gửi vào. Khi nhận được tín hiệu vi điều khiển vi điều khiển xử lý kích hoạt hệ thống theo yêu cầu thiết bị bật tắt theo từng kênh đã được lập trình.
4. Cụ thể hoạt động của mạch điều khiển thiết bị bằng thu, phát RF315 4 Kênh giao tiếp Pic16F
Chúc các bạn thành công…!!!